Exploring Creativity in Robotics: Can a Robot Be an Artist?
Delve into the world of robotics and creativity as we ponder the question: can a robot truly exhibit creativity? Join us on a journey to teach a robot to draw creatively, exploring the intersection of technology and artistry. Discover research principles of famous art designs and innovative projects
2 views • 15 slides
Bayesian Estimation and Hypothesis Testing in Statistics for Engineers
In this course on Bayesian Estimation and Hypothesis Testing for Engineers, various concepts such as point estimation, conditional expectation, Maximum a posteriori estimator, hypothesis testing, and error analysis are covered. Topics include turning conditional PDF/PMF estimates into one number, es
0 views • 16 slides
Estimation Clipboard 68 and New Esti-Mysteries Resources
Dive into Estimation Clipboard 68 and explore new Esti-Mysteries and Number Sense resources for everyday use in the classroom. Discover engaging activities and tools designed by Steve Wyborney to enhance mathematical learning experiences. Watch the instructional video, solve the bear estimation chal
0 views • 4 slides
Project Cost Estimation: Methods and Factors
Project cost estimation involves valuing all monetary aspects necessary for planning, implementing, and monitoring a project. This includes various entrants such as preliminary investigation costs, design fees, construction expenses, and more. The purpose of cost estimation is to determine work volu
1 views • 44 slides
Using the Estimation Clipboard in the Classroom
Explore tips for effectively using the Estimation Clipboard in the classroom to engage students in mathematical reasoning and estimation activities. The process involves inviting students to share estimates, encouraging written estimates and discussions, and revealing answers to promote engagement a
0 views • 5 slides
Understanding Scientific Attitude and Pedagogy of Science
Scientific attitude involves open-mindedness, curiosity, rationality, and a desire for accurate knowledge. It includes characteristics such as critical thinking, respect for diverse viewpoints, and a reliance on verified information. Developing a scientific attitude involves studying superstitions,
1 views • 6 slides
3D Human Pose Estimation Using HG-RCNN and Weak-Perspective Projection
This project focuses on multi-person 3D human pose estimation from monocular images using advanced techniques like HG-RCNN for 2D heatmaps estimation and a shallow 3D pose module for lifting keypoints to 3D space. The approach leverages weak-perspective projection assumptions for global pose approxi
0 views • 8 slides
Dealing with Range Anxiety in Mean Estimation
Dealing with range anxiety in mean estimation involves exploring methods to improve accuracy when estimating the mean value of a random variable based on sampled data. Various techniques such as quantile truncation, quantile estimation, and reducing dynamic range are discussed. The goal is to reduce
1 views • 12 slides

Mapping Robot using ROS, Lidar with Raspberry Pi & MATLAB
Turtle.bot is a popular product for home service robots, utilizing SLAM and navigation technologies. It features gyro, Kinect sensors, Lidar, and a laptop for mapping. The robot localizes and navigates using ROS in Raspberry Pi connected with MATLAB. ROS (Robot Operating System) is a set of software
0 views • 17 slides
Cultivating a Positive Attitude for Personal and Professional Excellence
Embrace the power of a positive attitude for personal and professional growth. Learn to shift behaviors, avoid cancerous habits, harness the strength of the human mind, and prioritize attitude over circumstances. Understand the significance of invisible concepts, the influence of one's mindset, and
0 views • 47 slides

Exploring Attitude, Mindset, and Success
Unpack the correlation between attitude and success, delving into the impact your mindset has on achieving goals. Discussions on personal experiences and examples shape a deeper understanding. Engage with TED Talks by Carol Dweck and Angela Duckworth, fostering development in growth mindset and grit
0 views • 10 slides
Autonomous Obstacle Avoidance Robot Using ROS, Lidar, and Raspberry Pi with Matlab Path Planning
Obstacle avoidance in robotics has evolved from basic collision avoidance to autonomous path planning with the use of Lidar and ROS. This project involves mapping the environment using Lidar scans and implementing a path planning algorithm in Matlab to navigate around obstacles. By utilizing a Raspb
0 views • 15 slides

Developing a Positive Attitude for Workplace Success
Having a positive attitude is crucial for career success. This article discusses the importance of maintaining a positive mindset in the workplace, how attitude influences professional outcomes, and the benefits of overcoming failures with a positive outlook. It also provides self-motivation tips an
1 views • 13 slides
Estimation Puzzle: How Many Blue Rocks in the Vase?
A fun estimation challenge where clues are provided to narrow down the possibilities of the number of blue rocks in a vase. By using critical thinking and estimation skills, participants deduce that there are 65 blue rocks in the vase. Test your estimation abilities with engaging visual clues and de
0 views • 6 slides
Micro:bit Robot Entry Tutorial with YahBoom - Buzzer Singing Lesson
In this engaging tutorial series, you will learn how to program a micro:bit robot to sing "Happy Birthday" using a buzzer. Follow step-by-step instructions to set up your micro:bit, connect it to your computer, search for coding blocks, and combine them to create a musical robot. Powered by YahBoom,
2 views • 8 slides
Building and Programming Self-Driving Robot Car with Elegoo Robot
Join the workshop to build and program a self-driving car using the Elegoo Robot and TinkerCAD Circuits. Learn to code functions for driving forward, left, right, backwards, and stopping. Complete the bronze, silver, and gold challenges to enhance your text programming skills. Get started with the c
1 views • 11 slides
Learn to Move Straight in Beginner Programming Lesson
This beginner programming lesson teaches how to make a robot move forward and backward using the Move Steering block, read sensor values, adjust power for direction, and explore different challenges to enhance programming skills. With step-by-step instructions and challenges, students can practice m
0 views • 12 slides
Dual-Pol Observations in NW Environment OLYMPEX Planning Meeting
The OLYMPEX planning meeting in Seattle on January 22, 2015 discussed the contribution of polarimetric S-band radar in rain estimation systems targeted by OLYMPEX. The use of specific differential phase (Kdp) helps in minimizing assumptions about drop size distribution, convective/stratiform distinc
1 views • 15 slides
Positive Attitude Leads to Success
Cultivating a positive attitude can significantly impact your success in achieving goals and overcoming challenges. Recognize the power of positive thinking and affirmations to boost self-confidence, perseverance, and desire for reaching your aspirations. Learn from examples like Muhammad Ali and th
0 views • 15 slides
Fermi Problems and Estimation Techniques in Science
Understand Enrico Fermi's approach to problem-solving through estimation in science as demonstrated by Fermi Problems. These problems involve making educated guesses to reach approximate answers, fostering creativity, critical thinking, and estimation skills. Explore the application of Fermi Problem
0 views • 23 slides
Innovative Tank-Filling Lorry Using Self-Controlling Robot Car Technology
Ethar, Abu Sarah, Dr. Luai Malhis, and Baidaa Al Bzoor have developed a tank-filling lorry powered by a self-controlling robot car that follows predetermined paths to specific tanks and utilizes RF signals for operation. The project aims to address water distribution challenges by creating a machine
0 views • 22 slides
Foundations of Parameter Estimation and Decision Theory in Machine Learning
Explore the foundations of parameter estimation and decision theory in machine learning through topics such as frequentist estimation, properties of estimators, Bayesian parameter estimation, and maximum likelihood estimator. Understand concepts like consistency, bias-variance trade-off, and the Bay
0 views • 15 slides
Software Development Cost Estimation Best Practices
Explore key principles and techniques for accurate cost estimation in software development projects. Discover the importance of the 5WHH principle, management spectrum, critical practices, resource estimation, estimation options, and decomposition techniques for improved project planning. Learn abou
0 views • 40 slides
Understanding Estimation and Statistical Inference in Data Analysis
Statistical inference involves acquiring information and drawing conclusions about populations from samples using estimation and hypothesis testing. Estimation determines population parameter values based on sample statistics, utilizing point and interval estimators. Interval estimates, known as con
0 views • 41 slides
Designing a Football Robot Referee for Lunar League Games
Design a robot assistant referee to support games played on the moon by indicating when the ball is out of play and retrieving it. The robot must also be sustainable, carry logos for fundraising, and operate effectively in the unique lunar environment. Safety precautions and thoughtful design consid
0 views • 9 slides
Advances in Tropical Cyclone Radar Rainfall Estimation
Reviewing past methods and introducing new tools for radar rainfall estimation in tropical cyclones. Discusses advancements in Dual Polarization rainfall estimation and NSSL's National Mosaic & Multi-Sensor Quantitative Precipitation Estimation. Includes insights on reflectivity-to-rainfall relation
0 views • 28 slides
Introduction to Statistical Estimation in Machine Learning
Explore the fundamental concepts of statistical estimation in machine learning, including Maximum Likelihood Estimation (MLE), Maximum A Posteriori (MAP), and Bayesian estimation. Learn about key topics such as probabilities, interpreting probabilities from different perspectives, marginal distribut
0 views • 23 slides
Mind Controlled Robot Project by Adithya Kumar - Eighth Grade
Adithya Kumar, an eighth-grade student, has designed a groundbreaking Mind Controlled Robot project that allows users to control a robot using brain waves. The project utilizes a Mindwave EEG headset, Arduino Uno motherboard kit, and various materials. Adithya's detailed experimental design and proc
0 views • 11 slides
Understanding Mobile Robot Kinematics for Navigation
Exploring the kinematics of wheeled locomotion in mobile robots, this content covers forward and inverse kinematics, instantaneous center of curvature, and the use of kinematics for robot navigation. Highlighting the challenges of measuring robot position and the integration of wheel velocities for
0 views • 52 slides
The Importance of a Positive Attitude in Serving the Lord
Understanding the impact of a positive attitude from Proverbs on one's spiritual well-being and growth, contrasting it with the dangers of a negative attitude. Emphasizes the importance of hope, belief, and positive thinking in serving God effectively and avoiding spiritual stagnation.
0 views • 19 slides
Towards Inclusive Human-Robot Interaction: A Focus on Accessibility
Exploring the intersection of human-robot interaction and accessibility, this presentation by Elaine Schaertl Short from Tufts University delves into language considerations, key legislation like the Americans with Disabilities Act and its amendments, and critiques of the medical model of disability
0 views • 19 slides
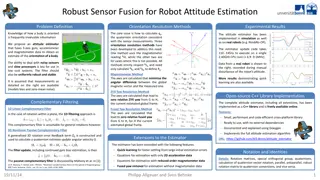
Robust Sensor Fusion for Robot Attitude Estimation
Attitude estimation is crucial for robots to understand their orientation relative to the global frame. This project presents an attitude estimator that combines gyro, accelerometer, and magnetometer data to calculate a quaternion orientation estimate. The robust sensor fusion method ensures accurat
0 views • 8 slides
Understanding Robot Localization Using Kalman Filters
Robot localization in a hallway is achieved through Kalman-like filters that use sensor data to estimate the robot's position based on a map of the environment. This process involves incorporating measurements, updating state estimates, and relying on Gaussian assumptions for accuracy. The robot's u
0 views • 26 slides
Understanding Two-Stage Local Linear Least Squares Estimation
This presentation by Prof. Dr. Jos LT Blank delves into the application of two-stage local linear least squares estimation in Dutch secondary education. It discusses the pros and cons of stochastic frontier analysis (SFA) and data envelopment analysis (DEA), recent developments in local estimation t
0 views • 24 slides

Shy Robot Programming Challenge: Logic-Based Autonomous Robot
The Shy Robot is an autonomous robot equipped with two IR sensors to avoid obstacles. Its behavior is determined by a logical control system - moving backward if both sensors detect an object, turning right if only the left sensor detects an object, turning left if only the right sensor detects an o
0 views • 5 slides
Installation of Robot-Mounted Detector on DIAD Beamline
Installing a robot-mounted detector on the DIAD beamline for the 2021 MOCRAF Workshop at the ICALEPCS conference. The robot arm holds a diffraction detector for dual imaging and diffraction purposes, ensuring safety for personnel, equipment, and integration into EPICS and GDA systems. Functionality
0 views • 28 slides
Futuristic Patient Assistant Robot Enhancing Healthcare
This research project introduces a patient assistant robot supervised by Dr. Ahmed Mostafa and presented by a team comprising Amira Ibrahim Sayed, Asmaa Mohamed Saad, and Amna Ahmed Mohammed. The robot aims to assist individuals with infectious diseases by providing essential care and isolating them
0 views • 22 slides

Universal Collaborative Robot Platform Revolutionizing Robotics Industry
The Universal Collaborative Robot Platform is a game-changer in the robotics world, providing full autonomy, innovation, creativity, and enhanced productivity through robot collaboration. With features like universal robot communication protocols, centralized fleet management, mobile autonomy, and A
0 views • 14 slides
Advanced Gaze Estimation Techniques: A Comprehensive Overview
Explore advanced gaze estimation techniques such as Cross-Ratio based trackers, Geometric Models of the Eye, Model-based Gaze Estimation, and more. Learn about their pros and cons, from accurate 3D gaze direction to head pose invariance. Discover the significance of Glint, Pupil, Iris, Sclera, and C
0 views • 40 slides
Understanding the Black-Scholes Formula and Volatility Estimation
The Black-Scholes formula, developed by Dr. Fernando Diz, is a widely used model for pricing options. This formula calculates the theoretical price of an option based on various inputs, with volatility being a key factor. Volatility estimation can be done through historical or implied methods, each
0 views • 18 slides