
FIRST LEGO League Robot Game Overview
FIRST LEGO League is an educational program that challenges students to design, build, and program LEGO robots to complete various missions on a themed game board. Teams compete in matches where their robots must autonomously move objects to score points. The program emphasizes teamwork, problem-sol
1 views • 33 slides
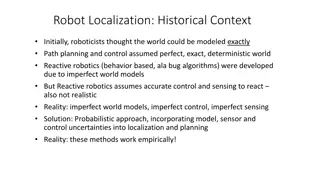
Evolution of Robot Localization: From Deterministic to Probabilistic Approaches
Roboticists initially aimed for precise world modeling leading to perfect path planning and control concepts. However, imperfections in world models, control, and sensing called for a shift towards probabilistic methods in robot localization. This evolution from reactive to probabilistic robotics ha
2 views • 36 slides
Exploring Creativity in Robotics: Can a Robot Be an Artist?
Delve into the world of robotics and creativity as we ponder the question: can a robot truly exhibit creativity? Join us on a journey to teach a robot to draw creatively, exploring the intersection of technology and artistry. Discover research principles of famous art designs and innovative projects
2 views • 15 slides

Global Collaborative Robot (Cobot) Market: Thriving Research Methodology
The Global Collaborative Robot Market is experiencing remarkable growth, and this article delves into its key trends, drivers, and potential for the future.
1 views • 2 slides

Revolutionizing Logistics: The Global Last-Mile Delivery Robot Market
According to BIS Research, the Global Last-Mile Delivery Robot Market was valued at $18.1 million in 2021, and it is estimated to reach $36.2 million by 2032 at a compound annual growth rate (CAGR) of 6.22% during the forecast period 2022-2032.
0 views • 2 slides

Streamlined Online Warranty Claim Submission with MAX Robot
Simplify your Daikin warranty claim process by utilizing the efficient online form processing robot, MAX. Keep essential information handy for quick and future-proof claim submissions. Receive status updates and financial settlements promptly via email.
0 views • 21 slides
Understanding SLAM Techniques for Robot Localization and Mapping
SLAM (Simultaneous Localization and Mapping) is a concept crucial for robots to construct and update maps while tracking their own locations. It is likened to a chicken and egg problem, where building a map and localizing the robot occur concurrently. Hardware, landmarks, and steps involved in SLAM
0 views • 29 slides

Mapping Robot using ROS, Lidar with Raspberry Pi & MATLAB
Turtle.bot is a popular product for home service robots, utilizing SLAM and navigation technologies. It features gyro, Kinect sensors, Lidar, and a laptop for mapping. The robot localizes and navigates using ROS in Raspberry Pi connected with MATLAB. ROS (Robot Operating System) is a set of software
0 views • 17 slides
Motion Planning in Klamp't: Overview and Key Concepts
Motion Planning in Klamp't covers key concepts such as C-Space and robot-level abstractions, planning algorithms, toolkit components, and the kinematic planning pipeline. It compares to other packages like OMPL, MoveIt!, and OpenRAVE, offering PRM-style planners at the C-Space level and support for
0 views • 26 slides
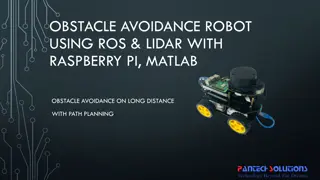
Autonomous Obstacle Avoidance Robot Using ROS, Lidar, and Raspberry Pi with Matlab Path Planning
Obstacle avoidance in robotics has evolved from basic collision avoidance to autonomous path planning with the use of Lidar and ROS. This project involves mapping the environment using Lidar scans and implementing a path planning algorithm in Matlab to navigate around obstacles. By utilizing a Raspb
0 views • 15 slides
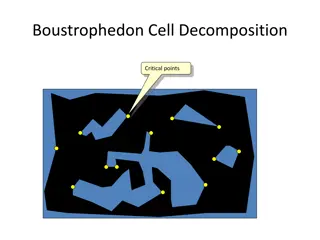
Robot Motion Planning Algorithms Overview
Explore Boustrophedon Cell Decomposition, Probabilistic Road Maps, and RRT Algorithm for robot motion planning. Learn how PRMs perform in practice but can face challenges in narrow passages leading to disconnected graphs.
0 views • 5 slides
Enhancing Education with Robotics: The KITT Robot Project
Educational Robotics project focused on introducing the KITT robot to educators, improving teaching methods through robotics, gathering feedback, and enhancing learning experiences for children. The project aimed to address the underutilization of educational robots in teaching and improve engagemen
0 views • 11 slides
Micro:bit Robot Entry Tutorial - Lesson on Tracking with YahBoom
Explore the world of robotics with this comprehensive tutorial series focused on tracking using YahBoom in micro:bit. Learn about black line tracking, infrared sensor principles, hardware setup, and block programming to enhance your robotics skills. Follow step-by-step instructions to create a fun a
0 views • 12 slides

Innovative Learning Management System - LAMS at Belgrade Metropolitan University
Belgrade Metropolitan University (BMU) utilizes the Learning Activity Management System (LAMS) to enhance the learning process by integrating learning objects with various activities. This system allows for complex learning processes, mixing learning objects with LAMS activities effectively. The pro
4 views • 16 slides
Micro:bit Robot Entry Tutorial with YahBoom - Buzzer Singing Lesson
In this engaging tutorial series, you will learn how to program a micro:bit robot to sing "Happy Birthday" using a buzzer. Follow step-by-step instructions to set up your micro:bit, connect it to your computer, search for coding blocks, and combine them to create a musical robot. Powered by YahBoom,
2 views • 8 slides
Building and Programming Self-Driving Robot Car with Elegoo Robot
Join the workshop to build and program a self-driving car using the Elegoo Robot and TinkerCAD Circuits. Learn to code functions for driving forward, left, right, backwards, and stopping. Complete the bronze, silver, and gold challenges to enhance your text programming skills. Get started with the c
1 views • 11 slides
Learn to Move Straight in Beginner Programming Lesson
This beginner programming lesson teaches how to make a robot move forward and backward using the Move Steering block, read sensor values, adjust power for direction, and explore different challenges to enhance programming skills. With step-by-step instructions and challenges, students can practice m
0 views • 12 slides
Exploring Artificial Intelligence and Its Applications
Artificial Intelligence (AI) is the ability for computers to mimic human thought processes, learn, and perform complex tasks independently. Machine learning is a subset of AI that enables systems to recognize patterns and make decisions. Sophia the AI robot is a humanoid robot designed for research
0 views • 10 slides
Innovative Tank-Filling Lorry Using Self-Controlling Robot Car Technology
Ethar, Abu Sarah, Dr. Luai Malhis, and Baidaa Al Bzoor have developed a tank-filling lorry powered by a self-controlling robot car that follows predetermined paths to specific tanks and utilizes RF signals for operation. The project aims to address water distribution challenges by creating a machine
0 views • 22 slides
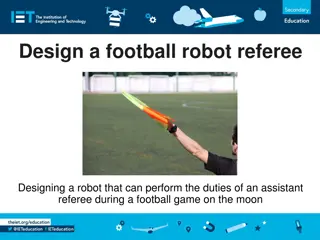
Designing a Football Robot Referee for Lunar League Games
Design a robot assistant referee to support games played on the moon by indicating when the ball is out of play and retrieving it. The robot must also be sustainable, carry logos for fundraising, and operate effectively in the unique lunar environment. Safety precautions and thoughtful design consid
0 views • 9 slides
Mind Controlled Robot Project by Adithya Kumar - Eighth Grade
Adithya Kumar, an eighth-grade student, has designed a groundbreaking Mind Controlled Robot project that allows users to control a robot using brain waves. The project utilizes a Mindwave EEG headset, Arduino Uno motherboard kit, and various materials. Adithya's detailed experimental design and proc
0 views • 11 slides
Innovative Autonomous Ground Robot for Orchard Management
This project showcases an Autonomous Ground Robot designed for orchard management tasks. The robot's hardware, software design, problem identification, and objectives are outlined. Key features include YOLO-based apple counting, SLAM navigation, and soil moisture detection. The system runs on Ubuntu
0 views • 19 slides
Understanding Mobile Robot Kinematics for Navigation
Exploring the kinematics of wheeled locomotion in mobile robots, this content covers forward and inverse kinematics, instantaneous center of curvature, and the use of kinematics for robot navigation. Highlighting the challenges of measuring robot position and the integration of wheel velocities for
0 views • 52 slides
Exploring Robotics: Robots, Minds, and Challenges
Delve into the fascinating world of robotics with a focus on the intersection of technology, psychology, and programming. Discover the science behind robot design, behavior-based robots, and adaptive learning. Explore real-world challenges such as self-driving cars, maze solving, and robot battle co
0 views • 16 slides
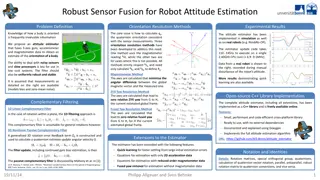
Robust Sensor Fusion for Robot Attitude Estimation
Attitude estimation is crucial for robots to understand their orientation relative to the global frame. This project presents an attitude estimator that combines gyro, accelerometer, and magnetometer data to calculate a quaternion orientation estimate. The robust sensor fusion method ensures accurat
0 views • 8 slides
Understanding Robot Localization Using Kalman Filters
Robot localization in a hallway is achieved through Kalman-like filters that use sensor data to estimate the robot's position based on a map of the environment. This process involves incorporating measurements, updating state estimates, and relying on Gaussian assumptions for accuracy. The robot's u
0 views • 26 slides

Shy Robot Programming Challenge: Logic-Based Autonomous Robot
The Shy Robot is an autonomous robot equipped with two IR sensors to avoid obstacles. Its behavior is determined by a logical control system - moving backward if both sensors detect an object, turning right if only the left sensor detects an object, turning left if only the right sensor detects an o
0 views • 5 slides
Learn to Make a Dancing Robot with micro:bit – YahBoom Tutorial
Dive into the world of robotics with this engaging tutorial on creating a dancing robot using micro:bit! Follow step-by-step instructions to program the robot to sing, dance, move in various directions, and synchronize light effects to music. Explore hardware setup, block coding, music scoring, and
0 views • 12 slides

Cutting-Edge Robotics Research in Interdisciplinary Field
Explore the cutting-edge research in robotics and artificial intelligence, focusing on topics such as real-time object recognition, robot mapping, and multi-robot cooperative pursuit. Discover how decision tree learning, data mining, and association rules play a crucial role in advancing the field o
0 views • 9 slides

Robot Learning for Manipulation: Challenges and Opportunities
A review of robot learning for manipulation presents key motivations, concepts, and formalization of learning tasks. It covers various aspects such as manipulations as physical systems, task decompositions, object-centric generalization, and learning object and environment representations.
0 views • 19 slides
Installation of Robot-Mounted Detector on DIAD Beamline
Installing a robot-mounted detector on the DIAD beamline for the 2021 MOCRAF Workshop at the ICALEPCS conference. The robot arm holds a diffraction detector for dual imaging and diffraction purposes, ensuring safety for personnel, equipment, and integration into EPICS and GDA systems. Functionality
0 views • 28 slides
Innovative Agricultural Robotics Project for Enhanced Farming Efficiency
Engage in a stimulating agricultural robotics project to design, build, and program a robot to perform specific tasks beneficial to farmers, agriculture businesses, and homeowners. Dive into researching designs, materials, and sketching detailed plans. Craft a compelling presentation showcasing the
0 views • 5 slides
Micro:bit Robot Ultrasonic Obstacle Avoidance Tutorial
Learn how to set up and program a micro:bit robot for ultrasonic obstacle avoidance. Follow the step-by-step guide to prepare hardware, connect the micro:bit to the computer, search for programming blocks, and test the ultrasonic sensor. Children can understand the concepts and experiment with obsta
0 views • 10 slides
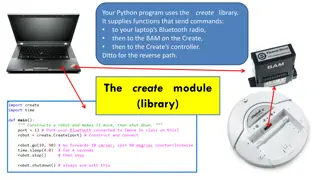
Python Create Library Overview
This Python program uses the Create library to send commands, enabling communication between your laptop's Bluetooth radio, the BAM on the Create robot, and the Create's controller. The library facilitates non-blocking commands for controlling the robot's movements and sensors, with specific instruc
0 views • 9 slides
Introduction to Robocode: A Fun and Interactive Programming Game
Robocode is a programming game where you simulate robot competitions by coding robots to battle autonomously. You program Java classes to define your robot's behavior on a simulated battlefield, learning software engineering principles in an engaging way. Explore robot anatomy, different components
0 views • 20 slides
Futuristic Patient Assistant Robot Enhancing Healthcare
This research project introduces a patient assistant robot supervised by Dr. Ahmed Mostafa and presented by a team comprising Amira Ibrahim Sayed, Asmaa Mohamed Saad, and Amna Ahmed Mohammed. The robot aims to assist individuals with infectious diseases by providing essential care and isolating them
0 views • 22 slides

Universal Collaborative Robot Platform Revolutionizing Robotics Industry
The Universal Collaborative Robot Platform is a game-changer in the robotics world, providing full autonomy, innovation, creativity, and enhanced productivity through robot collaboration. With features like universal robot communication protocols, centralized fleet management, mobile autonomy, and A
0 views • 14 slides
Strategic Design and Systems Engineering in FIRST Robotics: Detroit-Mercy Kick-off Event
Explore the essentials of strategic design and systems engineering in the context of FIRST Robotics as highlighted during the Detroit-Mercy Kick-off event. Delve into the significance of strategic identification, design purpose, and systems engineering to optimize robot functionality and performance
0 views • 18 slides
Lifelong and Continual Learning in Machine Learning
Classic machine learning has limitations such as isolated single-task learning and closed-world assumptions. Lifelong machine learning aims to overcome these limitations by enabling models to continuously learn and adapt to new data. This is crucial for dynamic environments like chatbots and self-dr
0 views • 32 slides
Innovative Robot Design: Meet Amazing Andy-Roid 3000
Meet the amazing Andy-Roid 3000, a revolutionary household robot designed to take care of all your chores. This persuasive advert showcases the robot's cutting-edge features, such as voice recognition, multiple arms, and seamless navigation, all aimed at giving you more free time and peace of mind.
0 views • 6 slides