
Rescue Drone: Increasing Autonomy and Implementing Computer Vision
Focuses on developing a rescue drone with increased autonomy and implementing computer vision for advanced object detection. The team, consisting of Cody Campbell (Hardware Engineer), Alexandra Borgesen (Computer Engineer), Halil Yonter (Team Leader), Shawn Cho (Software Engineer), Peter Burchell (M
77 views • 44 slides

Revolutionizing Agriculture with Drone Technology in India
Exploring the current and future landscape of drone technology in India, specifically its impact on agriculture. From the use of drones for spraying pesticides to the government's initiative of providing drones to women's self-help groups, the potential benefits for farmers are immense. Experts beli
1 views • 82 slides

Risk Management Plan for Drone Operations
This document outlines a comprehensive risk management plan for drone operations, covering areas such as operational zones, probability assessment, severity definitions, and specific risks like rotor damage in flight. Detailed maps and mitigation strategies are provided to ensure safe and effective
1 views • 12 slides

Exploring Drone Usage in Tacoma: Regulations, Legislation, and Applications
Discussing the front end of the drone issue in Tacoma, covering prohibited locations, legislative developments, FAA operational requirements, and the use of drones as first responders. The content delves into privacy concerns, operational restrictions, and the various applications of drones in law e
4 views • 12 slides
Understanding 2D Collision Detection in Game Development
Explore the intricacies of 2D collision detection in game development through methods like distance checks, bounding shapes, and optimizing collision tests. Dive into concepts like sprite speed assumptions, square-square collisions, and rectangle testing complexities. Learn about useful Rectangle me
5 views • 29 slides
Drone Detection Using mmWave Radar for Effective Surveillance
Utilizing mmWave radar technology for drone detection offers solutions to concerns such as surveillance, drug smuggling, hostile intent, and invasion of privacy. The compact and cost-effective mmWave radar systems enable efficient detection and classification of drones, including those with minimal
0 views • 8 slides

Drone Team Operations and Regulations Overview by Duluth Police Department
The Duluth Police Department operates a Small Unmanned Aerial System (SUAS) Drone Team regulated by FAA and Minnesota State Statute 626.19. The team follows strict FAA regulations, state statutes, and departmental policies for SUAS operations. Compliance with search warrant requirements, restricted
0 views • 23 slides
Flying Tips for 3DR Solo Drone with Sidepilot App
Learn how to fly the 3DR Solo drone using the Sidepilot app efficiently. Get guidance on installing props, powering on the device, connecting it via Sidepilot, and understanding flight controls. Follow the step-by-step instructions to ensure a smooth drone flying experience.
0 views • 15 slides
Spectrum Sensing for Enhanced Channel Access in Wireless Networks
This document presents a proposal for Spectrum Sensing Based Deferral (SSBD) to improve channel access in wireless networks. SSBD incorporates spectrum sensing with transmission deferral in a time-bound manner to enhance performance, reliability, and latency control. The proposed solution safeguards
1 views • 11 slides

Drone Major Group: Update Briefing for DIAG
Independent advisory service providing insights on drone and counter-drone technology across various environments. Offers a global network of suppliers, industry support, and a mission-driven Drone Delivery Group. Recommends collaboration with the DIAG for sharing expertise and forming wider industr
2 views • 5 slides

Exploring Challenges and Opportunities in Adopting a Drone Program
Exploring the complexities involved in establishing a drone program, this content discusses public perceptions, realities, policy considerations, partnerships, board approvals, liability concerns, justifications, and the process of obtaining a Certificate of Authorization. It delves into issues such
0 views • 22 slides
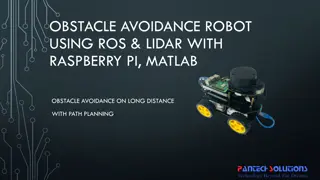
Autonomous Obstacle Avoidance Robot Using ROS, Lidar, and Raspberry Pi with Matlab Path Planning
Obstacle avoidance in robotics has evolved from basic collision avoidance to autonomous path planning with the use of Lidar and ROS. This project involves mapping the environment using Lidar scans and implementing a path planning algorithm in Matlab to navigate around obstacles. By utilizing a Raspb
0 views • 15 slides
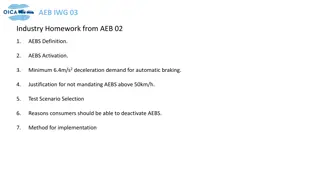
Advanced Emergency Braking System (AEBS) Definition and Activation Guidelines
The provided content outlines the definition and activation requirements of the Advanced Emergency Braking System (AEBS). It covers the phases involved, including Collision Warning and Emergency Braking, as well as the speed limitations for activation. The system aims to automatically detect potenti
0 views • 12 slides
Understanding Deadlock: Conditions, Detection, and Avoidance
Explore strategies for dealing with deadlocks, from detection and recovery to dynamic avoidance. Learn about deadlock avoidance methods like being conservative in resource granting and dive into safe and unsafe states, the Banker's algorithm, and the four conditions for deadlock. Discover how to pre
0 views • 15 slides

Innovative DIY Quadcopter Project with Autonomous Features
Explore the Drone Project by Krish Kabra & Stefan Orosco, detailing the creation of a DIY Quadcopter Drone with Arduino-based control, radio-frequency, PID stabilization, collision avoidance, and voice control. Discover its applications in search and rescue, agriculture, entertainment, and defense,
0 views • 27 slides

ICAROS Challenge Drone Race 2018: Exciting High School Competition
The ICAROS Challenge Drone Race 2018 took place at High School St. Exupery in Blagnac, France, featuring five high schools competing in a thrilling drone racing event. Each school created unique obstacles for the race, and students operated toy drones through a challenging circuit. The competition r
0 views • 9 slides

Drone Pilot Health and Safety Guidelines
Understanding the importance of maintaining good health and following safety protocols is essential for drone pilots. This includes being in good general health, taking breaks for eating and drinking, being cautious with medicines, and avoiding alcohol and recreational drugs. Neglecting these factor
0 views • 16 slides
Understanding Avoidance Behavior and Its Theories
Avoidance behavior involves negative reinforcement to increase the frequency of operant responses, not punishment. Different types of avoidance tests, such as discriminated avoidance and shuttle avoidance, are used to study negative reinforcement. The Two-Factor Theory of avoidance conditioning expl
0 views • 61 slides
Revolutionizing Drone Operations with Windhover Ecosystem
Windhover Ecosystem, developed through NASA SBIR Phase I and II, offers a robust and open-source software solution for drone operations. The ecosystem includes integrated flight and ground control software, providing scriptable flight control, rapid prototyping, and full autonomy capabilities. Lever
0 views • 23 slides
Drone Product Comparison and Market Analysis
A detailed analysis of various drone products including Phantom 3 Professional, Solo Smart Drone, and X8+, highlighting features such as cost, weight, flight time, battery capacity, payload, and more. The predicted market value trends and key considerations like durability, affordability, and lightw
0 views • 18 slides
Acquisition, Tracking, and Pointing (ATP) for NG-OWC System in Drone Networks
The research discusses the implementation of Acquisition, Tracking, and Pointing (ATP) in Next-Generation Optical Wireless Communication (NG-OWC) systems for drone networks. It covers the background of drone networks, ATP overview, schemes, tracking mechanism, current developments, challenges, and c
0 views • 16 slides

CRM, Safety, Maintenance, and Review Guide for Drone Pilots
This guide covers Crew Resource Management (CRM), Safety precautions, Drone Maintenance tips, and a Review checklist for drone pilots. Learn about effective CRM practices, safety guidelines for flying drones, essential maintenance checks, and the I'M SAFE checklist to ensure safe and responsible dro
0 views • 15 slides
Functional Requirements for Drone Networks with OCC
Explore the functional requirements for drone networks based on Next Generation OCC, offering secure communication, RF interference immunity, low latency, and high bandwidth. The system overview of a multi-drone system is discussed, showcasing how drones communicate, collaborate, and perform various
0 views • 11 slides

Unlocking Opportunities in the Commercial Drone Industry
DroneLife, established in 2013, offers comprehensive digital marketing solutions catering to the commercial drone sector. With a focus on branding, lead generation, and sponsored content, DroneLife's reach extends globally to industry leaders and enthusiasts alike. Through avenues like podcasts and
0 views • 17 slides
Compact Aerial Photogrammetry System (CAPS) with VTOL Drone
Developing a Compact Aerial Photogrammetry System (CAPS) utilizing a fixed-wing VTOL drone equipped with cameras and GPS for generating georeferenced maps of large areas. The system combines drone versatility with advanced image analysis, enabling aerial assessments and coherent change detection. Pr
0 views • 18 slides
Enhancing Drone Safety Measures with Parachute Functionality
This project focuses on ensuring safety measures during critical scenarios by activating the parachute function embedded within the drone's software. By replicating and simulating this action in a virtual environment, the effectiveness and reliability of the drone's emergency protocols are enhanced.
0 views • 8 slides
Drone Collision Avoidance Simulator for Autonomous Maneuvering
Our project focuses on developing a drone collision avoidance simulator using NEAT and Deep Reinforcement Learning techniques. We aim to create a model that can maneuver obstacles in a 2D environment, enhancing performance and survivability. Previous attempts utilizing non-machine learning solutions
0 views • 28 slides
Application of STPA on Small Drone Operations: A Benchmarking Approach
This study focuses on the application of the System Theoretic Process Analysis (STPA) methodology to identify hazards and safety requirements for small drone operations. It addresses the lack of a uniform regulatory framework for unmanned aircraft systems, especially for light drones, and explores t
0 views • 21 slides
Overview of Canadian and South African General Anti-Avoidance Rules (GAARs)
This review discusses the General Anti-Avoidance Rules (GAARs) in Canada and South Africa, focusing on the criteria for identifying avoidance transactions and impermissible avoidance arrangements. The Canadian GAAR targets transactions seeking tax benefits, while the South African GAAR focuses on bu
0 views • 15 slides
Analysis of Tax Avoidance Transactions in Case Study on GAAR Application
The case study explores the incorporation of a business into a corporation to realize tax benefits, including tax deferral and lower rates. It raises questions on whether the transactions were primarily for tax avoidance purposes, highlighting the complexities of tax planning and the application of
0 views • 47 slides
Understanding GST Fraud and Avoidance Schemes
Exploring the nuances between tax fraud and tax avoidance in the context of GST, this content delves into types of GST abuse, Division 165 anti-avoidance rule, scheme structures, and consequences of GST fraud. Learn about the implications of dishonest tax practices and lawful tax conduct in the real
0 views • 10 slides
Understanding BEPS Action Plan 7: Preventing Artificial Avoidance of Permanent Establishment Status
The Action 7 Report aims to prevent artificial avoidance of Permanent Establishment (PE) status by making changes to the PE definition in the OECD Model Tax Convention. BEPS refers to tax planning strategies exploiting tax rule gaps to shift profits to low-tax locations. The OECD issued 15 action pl
0 views • 10 slides
Effective Coping Strategies for Stress Management
Avoidance coping is described as a maladaptive way of dealing with stress by avoiding the source of discomfort. In contrast, active coping involves addressing stressors directly through cognitive or behavioral strategies. Avoidance coping can lead to increased stress and conflict in relationships, w
0 views • 11 slides
Foundations of Cryptography: Digital Signatures and Collision-Resistant Hash Functions
Foundations of Cryptography explores the construction of digital signature schemes and collision-resistant hash function families using one-way functions and safe primes. The content delves into the concept of collision-resistant hash functions and their construction from the discrete logarithm prob
0 views • 31 slides
Privacy Address Requirements for Wireless Personal Area Networks
This document discusses the privacy address requirements for IEEE P802.15 Working Group's TG4ab standard for Wireless Personal Area Networks (WPANs). It covers the need for 48-bit addresses with collision resistance, the use of different privacy addresses for each frame, and the adequacy of 12-bit c
0 views • 8 slides
Understanding TCAS - Traffic Collision Avoidance System
A Traffic Collision Avoidance System (TCAS) is a vital aircraft collision avoidance technology that helps reduce mid-air collisions by monitoring the airspace around an aircraft. TCAS operates independently of ground-based equipment and advises pilots on potential conflicting aircraft. Mandated by t
0 views • 13 slides
Vehicle Safety Protocols: Handling Tire Blows, Brake Failure, and More
Learn essential actions for handling emergencies like tire blowouts, brake failure, stuck accelerator, and steering failure. Additionally, understand off-road recovery, minimizing damage due to potholes, and escaping from a sinking vehicle. Discover collision avoidance techniques and steps to take i
0 views • 9 slides
Micro:bit Robot Ultrasonic Obstacle Avoidance Tutorial
Learn how to set up and program a micro:bit robot for ultrasonic obstacle avoidance. Follow the step-by-step guide to prepare hardware, connect the micro:bit to the computer, search for programming blocks, and test the ultrasonic sensor. Children can understand the concepts and experiment with obsta
0 views • 10 slides
Understanding Hash Tables and Hashing Concepts in Computer Algorithms
This content delves into the concept of Hash Tables, covering topics such as the support for dictionary operations, achieving constant time through direct address tables, case studies in web server maintenance, and an exploration of hashing functions and collision avoidance. It also touches upon key
0 views • 40 slides

Professional Drone Roof Inspection Services
Discover cutting-edge drone roof inspections with UK National Roofing. Our advanced drone technology offers a safe, accurate, and cost-effective way to inspect roofs, providing high-resolution images and videos that reveal even the smallest issues. P
1 views • 5 slides