Understanding Convolution in DT LTI Systems
Explore the concept of convolution in discrete-time Linear Time-Invariant systems, where signals are represented as linear combinations of basic building blocks. Learn about unit pulses, impulse responses, and how LTI systems are characterized by their unit pulse response. Visualize the convolution operation and calculate successive output values through shifting unit pulse responses.

Download Presentation

Please find below an Image/Link to download the presentation.
The content on the website is provided AS IS for your information and personal use only. It may not be sold, licensed, or shared on other websites without obtaining consent from the author. If you encounter any issues during the download, it is possible that the publisher has removed the file from their server.
You are allowed to download the files provided on this website for personal or commercial use, subject to the condition that they are used lawfully. All files are the property of their respective owners.
The content on the website is provided AS IS for your information and personal use only. It may not be sold, licensed, or shared on other websites without obtaining consent from the author.
E N D
Presentation Transcript
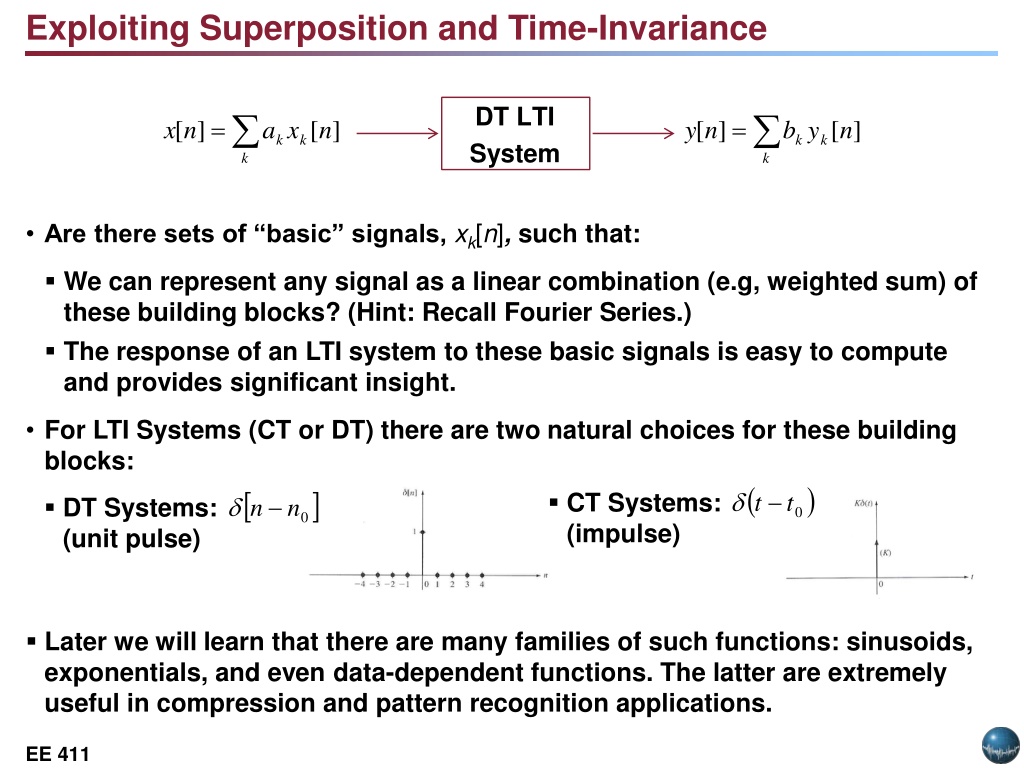
Exploiting Superposition and Time-Invariance DT LTI System k k = = [ ] [ ] [ ] [ ] x n a x n y n b y n k k k k Are there sets of basic signals, xk[n], such that: We can represent any signal as a linear combination (e.g, weighted sum) of these building blocks? (Hint: Recall Fourier Series.) The response of an LTI system to these basic signals is easy to compute and provides significant insight. For LTI Systems (CT or DT) there are two natural choices for these building blocks: n ( ) x.JPG t CT Systems: (impulse) 0t x.JPG DT Systems: (unit pulse) 0 n Later we will learn that there are many families of such functions: sinusoids, exponentials, and even data-dependent functions. The latter are extremely useful in compression and pattern recognition applications. EE 3512: Lecture 14, Slide 0 EE 411
Representation of DT Signals Using Unit Pulses EE 3512: Lecture 14, Slide 1 EE 411
Response of a DT LTI Systems Convolution DT LTI n h k k = = [ ] [ ] [ ] [ ] x n a x n y n b y n k k k k Define the unit pulse response, h[n], as the response of a DT LTI system to a unit pulse function, [n]. Using the principle of time-invariance: ] [ ] [ ] [ ] [ k n h k n n h n convolution operator Using the principle of linearity: = = = = = [ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ] x n x k n k y n x k h n k x n h n k k Comments: convolution sum Recall that linearity implies the weighted sum of input signals will produce a similar weighted sum of output signals. Each unit pulse function, [n-k], produces a corresponding time-delayed version of the system impulse response function (h[n-k]). The summation is referred to as the convolution sum. The symbol * is used to denote the convolution operation. EE 3512: Lecture 14, Slide 2
LTI Systems and Impulse Response The output of any DT LTI is a convolution of the input signal with the unit pulse response: DT LTI n h = [ ] [ ] * [ ] y n x n h n [n x ] = = = = = [ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ] x n x k n k y n x k h n k x n h n k k Any DT LTI system is completely characterized by its unit pulse response. Convolution has a simple graphical interpretation: EE 3512: Lecture 14, Slide 3 EE 411
Visualizing Convolution There are four basic steps to the calculation: The operation has a simple graphical interpretation: EE 3512: Lecture 14, Slide 4 EE 411
Calculating Successive Values We can calculate each output point by shifting the unit pulse response one sample at a time: = [ ] [ ] [ ] y n x k h n k = k y[n] = 0 for n < ??? y[-1] = y[0] = y[1] = y[n] = 0 for n > ??? Can we generalize this result? EE 3512: Lecture 14, Slide 5 EE 411
Graphical Convolution 2 1 (k ) h -1 -1 1 (k ) x -1 = k ) 3 = = ( ( ) ( 3 ) 0 y x k h k ( 3 ) h k = k ) 2 = = ( ( ) ( 2 ) 0 y x k h k ( 2 ) h k ) 1 = = ( 1 ( ) 1 )( 1 y ( 1 ) h k = + = ) 0 ( y 1 ( ) 0 )( 2 ( ) 1 )( 2 0 ( h ) k k = -6 -5 -4 -3 -2 -1 0 1 2 3 4 5 6 7 8 9 EE 3512: Lecture 14, Slide 6 EE 411
Graphical Convolution (Cont.) 2 1 (k ) h -1 -1 1 (k ) x -1 = ) 1 )( 1 + + ) 1 )( 1 = ) 1 ( y ( 2 ( ) 0 )( ( 2 1 ( h ) k = + ) 1 ) 2 ( y 1 ( + ) 0 )( 2 ( )( 2 ( h ) k ) 0 )( 1 + ) 1 )( 1 = ( ( 2 = + ) 3 ( y 1 ( + ) 0 )( 2 ( ) 0 )( + 3 ( h ) k ) 1 ) 0 )( 1 = ( 1 )( ( 1 = ) 1 = ) 4 ( y ( 1 )( 1 4 ( h ) k k = -6 -5 -4 -3 -2 -1 0 1 2 3 4 5 6 7 8 9 EE 3512: Lecture 14, Slide 7 EE 411
Graphical Convolution (Cont.) Observations: y[n] = 0 for n > 4 If we define the duration of h[n] as the difference in time from the first nonzero sample to the last nonzero sample, the duration of h[n], Lh, is 4 samples. Similarly, Lx = 3. The duration of y[n] is: Ly = Lx + Lh 1. This is a good sanity check. The fact that the output has a duration longer than the input indicates that convolution often acts like a low pass filter and smoothes the signal. EE 3512: Lecture 14, Slide 8 EE 411
Examples of DT Convolution Example: delayed unit-pulse Example: unit-pulse = = [ ] [ ] [ ] [ ] h n n n h n n 0 = = = = [ ] [ ] [ ] y n x k h n k [ ] [ ] [ ] y n x k h n k k k = = = = = = [ ] [ ] [ ] [ ] [ ] [ ] x k n k x n x k n n k x n n 0 0 k k Example: unit step Example: integration = ] [ u a n h = [ ] [ ] x n u n [ ] [ ] h n u n = n [ ] 1 n a = k = [ ] [ ] [ ] y n x k h n k k = [ ] [ ] [ ] y n x k h n k n = k = k = = [ ] [ ] [ ] x k u n k x k = k = n [ ] [ ] u n a u n = = + + n + ) 1 ( [ ] 1 ( ) [ ] 1 ... n a n = 1 a 0 + 1 1 n = 1 0 n a EE 3512: Lecture 14, Slide 9 EE 411
Properties of Convolution Implications Commutative: = [ ] * [ ] [ ] * [ ] x n h n h n x n Distributive: + = [ x ] * ( [ ] [ x ]) n x n h n h n 1 2 + ( [ ] * [ ]) ( [ ] * [ ]) n h n h n 1 2 Associative: = [ x ] * [ ] * [ h ] x n h n h n 1 h 2 = ( [ ] * [ ]) * [ ] n n n 1 2 ( [ ] * [ ]) * [ ] x n h n h n 2 1 EE 3512: Lecture 14, Slide 10 EE 411
Useful Properties of (DT) LTI Systems = Causality: [ ] 0 0 h n n = k Stability: h ] [ k Bounded Input Bounded Output Sufficient Condition: for [ ] x n x max = k = k = [ ] [ ] [ ] [ ] y n x k h n k x h n k max Necessary Condition: = k x = if [ ] h n k = = * Let [ ] [ / ] [ , ] then [ ] 1 (bounded) n h n h n x n = k = k = k = = = = * But y[0] [ ] 0 [ ] [ ] [ / ] [ ] [ ] x k h k h k h k h k h k EE 3512: Lecture 14, Slide 11 EE 411
Summary We introduced a method for computing the output of a discrete-time (DT) linear time-invariant (LTI) system known as convolution. We demonstrated how this operation can be performed analytically and graphically. We discussed three important properties: commutative, associative and distributive. Question: can we determine key properties of a system, such as causality and stability, by examining the system impulse response? There are several interactive tools available that demonstrate graphical convolution: ISIP: Convolution Java Applet. EE 3512: Lecture 14, Slide 12 EE 411







")
")


 LTI Systems")