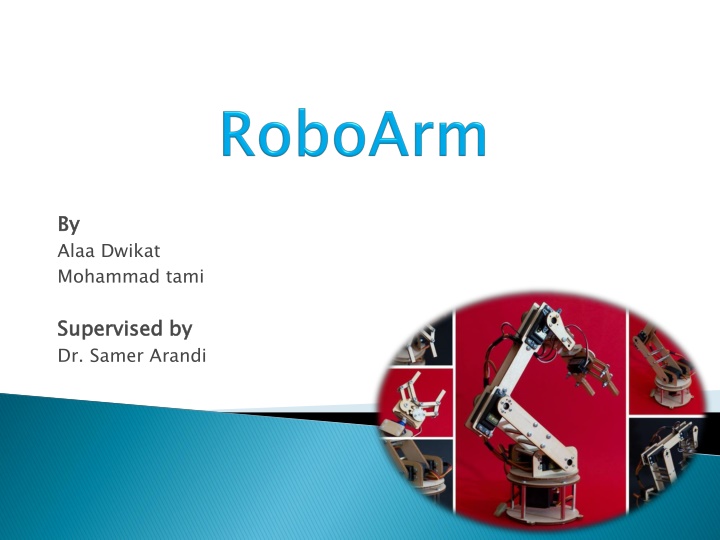
RoboArm for Efficient Item Capture and Task Automation
"Explore the innovative RoboArm project designed to capture items with precision and control, perfect for tasks in quarantine environments. This advanced machine allows users to manipulate the robotic arm wirelessly using a special glove. Discover the use of PVC, DC and servo motors in the 4-degree-of-freedom robotic arm for efficient operations. Enhance your understanding of mechanical parts, sensors, communication, and controllers integrated into this cutting-edge system."

Download Presentation

Please find below an Image/Link to download the presentation.
The content on the website is provided AS IS for your information and personal use only. It may not be sold, licensed, or shared on other websites without obtaining consent from the author. If you encounter any issues during the download, it is possible that the publisher has removed the file from their server.
You are allowed to download the files provided on this website for personal or commercial use, subject to the condition that they are used lawfully. All files are the property of their respective owners.
The content on the website is provided AS IS for your information and personal use only. It may not be sold, licensed, or shared on other websites without obtaining consent from the author.
E N D
Presentation Transcript
By Alaa Dwikat Mohammad tami By Supervised by Dr. Samer Arandi Supervised by
Overview Mechanical part Sensors Communication Controller part Conclusion
RoboArm is a machine which allows the user to capture items (stuffed toys, balls ) that are placed in a round. The player wears a special glove and moves his hand left right, forward - backward and closes his fist in order to control wirelessly the moving arm that ends with a gripper.
Our project can be used to control a group of components coordinated together to complete a specific tasks. Quarantine Environments (e.g. Chemical laboratories)
Overview Mechanical part Sensors Communication Controller part Conclusion
Material Design Motors
We used PVC It s very light can be easily clipped
Two types of motors used DC motor Servo motor
Servo motors It s an angular position controlled
Overview Mechanical part Sensors Communication Controller part Conclusion
Player hand act as a main controller of all mechanical part components. Two type of sensors are used: Flex Sensor. Accelerometer Sensor.
Overview Mechanical part Sensors Communication Controller part Conclusion
Wireless XBee Send results of sensors (located on the glove ) to microcontroller that control the mechanical part. Frequency 2.4 GHz ( 16 channel) Data rate 250 Kbps Range 30 meters in door, and can reach up to 90 m outdoor. Point-to-point, point-to-multipoint and peer-to-peer topologies supported.
Overview Mechanical part Sensors Communication Controller part Conclusion
Sender Circuit Receiver circuit
Overview Mechanical part Sensors Communication Controller part Conclusion
We are able to simulate user hand movement by sending sensors data to the microcontroller that controls arm robot.
Provide an additional degree of freedom by add more axes. Using another module for wireless connection, so that the cost be cheap Finally we can design five-fingers hand instead of a gripper.
Demo Demo Time Time