Challenges of Borehole Communication in Oil Wells
This research explores the challenges faced in borehole communication within oil wells, emphasizing the need for efficient data transmission for well drilling operations. Various telemetry methods, including wireless telemetry using acoustic waves, are discussed to optimize communication in deep drilling environments.

Download Presentation

Please find below an Image/Link to download the presentation.
The content on the website is provided AS IS for your information and personal use only. It may not be sold, licensed, or shared on other websites without obtaining consent from the author.If you encounter any issues during the download, it is possible that the publisher has removed the file from their server.
You are allowed to download the files provided on this website for personal or commercial use, subject to the condition that they are used lawfully. All files are the property of their respective owners.
The content on the website is provided AS IS for your information and personal use only. It may not be sold, licensed, or shared on other websites without obtaining consent from the author.
E N D
Presentation Transcript
Challenges of Borehole Communication in Oil Wells Ali Abdi, PhD Electrical & Computer Engineering Dept., NJIT PhD advisee: A. Alenezi CWCSPR Research Day March 29, 2016
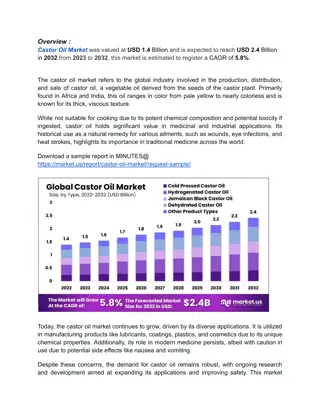
Extraction of Oil and Gas Extraction of Oil and Gas Oil and natural gas reservoirs are located more than 2 miles underground Have to drill wells to extract oil and gas The drill operator needs to have information about the environment that facing the drill bit. Different sensors placed close to the drill bit to gather information about the parameters downhole, e.g., pressure, temperature, torque, Drill string underneath an oil rig Image from http://www.daviddarling.info/encyclopedia/P/petroleum.html
Why Logging While Drilling? Why Logging While Drilling? Reduce the cost of well drilling Avoid drilling risks Reduce the time of drilling operations - A Short Video Black Gold, Part 1, Watch 1:50-3:20
Telemetry Methods Telemetry Methods Wireline Telemetry Interferes with drilling operations Expensive Prone to failure Mud-Pulse Telemetry Very low data rates, typically less than 10 bits/sec.
Wireless Telemetry Using Acoustic Waves Wireless Telemetry Using Acoustic Waves Rx Advantage Acoustic waves can carry data up and down the drill-string without interrupting the drilling Challenges - Attenuation and reflections due to impedance mismatch at the pipes joints - Downhole and surface noise sources produce substantial in-band noise power Figure from Acoustic channel model for adaptive downhole communication over deep drill strings, M. A. Gutierrez-Estevez, et al., ICASSP 2013. Tx
Acoustic Wave Propagation in Drill Strings Acoustic Wave Propagation in Drill Strings = ?2 ?1+ ?2 ?2 ?2 ?2 ?2 ?1= ?1?1+ ?1?2 ?1 ?1 (1) U: Up-going wave D: Down-going wave ? ? ? ? (2) =???? ? ? 0 ? ? ??? 0 ? ?
Acoustic Wave Propagation in Drill Strings Acoustic Wave Propagation in Drill Strings (cont d) (cont d) ???=1 ? ???1 ?????1 ?? ???1 ????1 ? ?? ? ???2 ?????2 ?? ???2 ????2 ???=1 ? ?1 ?2 ?1 ?1 ?2? 1 ?2? 1 = ???1???1???2 ??? ? 1??? ? ??
Drill String Channel Model Using Transfer Drill String Channel Model Using Transfer Matrix Method Matrix Method ?1 ?1?1 ?2? 1?2? 1 ?2 Impulse Response Freuencu Response 1 0.15 0.9 0.1 0.8 0.05 0.7 0.6 0 Amplitude Amplitude 0.5 -0.05 0.4 0.3 -0.1 0.2 -0.15 0.1 0 -0.2 0 1000 2000 3000 Hz 4000 5000 6000 0 100 200 300 400 500 ms 600 700 800 900 1000
Additive Noise Additive Noise There are two main noise sources: - Surface Noise - Drill-bit Noise Noise power is comparable to the received signal power Surface noise is the dominant noise Figure from Directional propagation cancellation for acoustic communication along the drill string, S. Sinanovic, et al., ICASSP 2006
Laboratory Setup Laboratory Setup - Drill string constructed using 6 pipes and 5 tool-joints. - Two accelerometers to measure signal at the other end.
Excited one end of the drill Excited one end of the drill- -string using a steel tool tool string using a steel - Impulse and frequency responses of the signal are shown below. - We can see the stop-bands and pass-bands in the frequency response. Sensors output on the same figure 0.25 -5 Sensors output on the same figure 20x 10 Sensor1 Sensor2 0.2 Sensor1 Sensor2 0.15 0.1 Amplitude 0.05 Amplitude 10 0 -0.05 -0.1 -0.15 0 -0.2 0 1 2 3 4 5 6 7 8 9 5 0 1000 2000 3000 4000 5000 6000 time sample Frequency Sample Hz x 10
Excited one end of the drill Excited one end of the drill- -string using a steel tool (cont d) tool (cont d) string using a steel - Zoomed in frequency responses are shown below. - Both sensors show almost similar response. -5 -5 Sensors output on the same figure Sensors output on the same figure x 10 x 10 18 Sensor1 Sensor2 Sensor1 Sensor2 14 16 14 12 12 10 10 Amplitude Amplitude 8 8 6 6 4 4 2 2 0 1800 2000 2200 2400 2600 2800 3000 400 500 600 700 800 900 Frequency Sample Hz Frequency Sample Hz
Drill Drill- -string with a tool string with a tool- -joint added to the receiver pipe s end receiver pipe s end joint added to the Sensors output on the same figure 0.3 Sensor1 Sensor2 0.2 0.1 0 Amplitude -0.1 -0.2 -0.3 -0.4 0 1 2 3 4 5 6 7 8 9 5 time sample x 10
Drill Drill- -string with a tool string with a tool- -joint added to the receiver pipe s end (cont d) receiver pipe s end (cont d) joint added to the -4 Sensors output on the same figure x 10 -5 Sensors output on the same figure x 10 Sensor1 Sensor2 4.5 8 Sensor1 Sensor2 4 7 3.5 6 3 5 Amplitude Amplitude 2.5 4 2 3 1.5 2 1 1 0.5 0 2100 2150 2200 Frequency Sample Hz 2250 2300 2350 0 1000 2000 3000 4000 5000 Frequency Sample Hz
Ultrasonic Actuator Ultrasonic Actuator The Magnetostrictive transducer can generate signals with frequency up to 20 KHz.
Ultrasonic Actuator (contd) Ultrasonic Actuator (cont d) Transmitting a sinusoidal signal at 18 KHz over a single pipe 1.5 1.6 1 1.4 X: 1.795e+04 Y: 1.475 1.2 0.5 1 0 Amplitude 0.8 -0.5 0.6 -1 0.4 -1.5 0.2 -2 0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 Frequency Sample Hz 4 x 10 x 10
Work in Progress Work in Progress Optimal equalizer and preprocessor design More effective noise cancellation methods















")