Acceleration Diagrams for a Link in Theory of Machines

Theory of machines
Wessam Al Azzawi
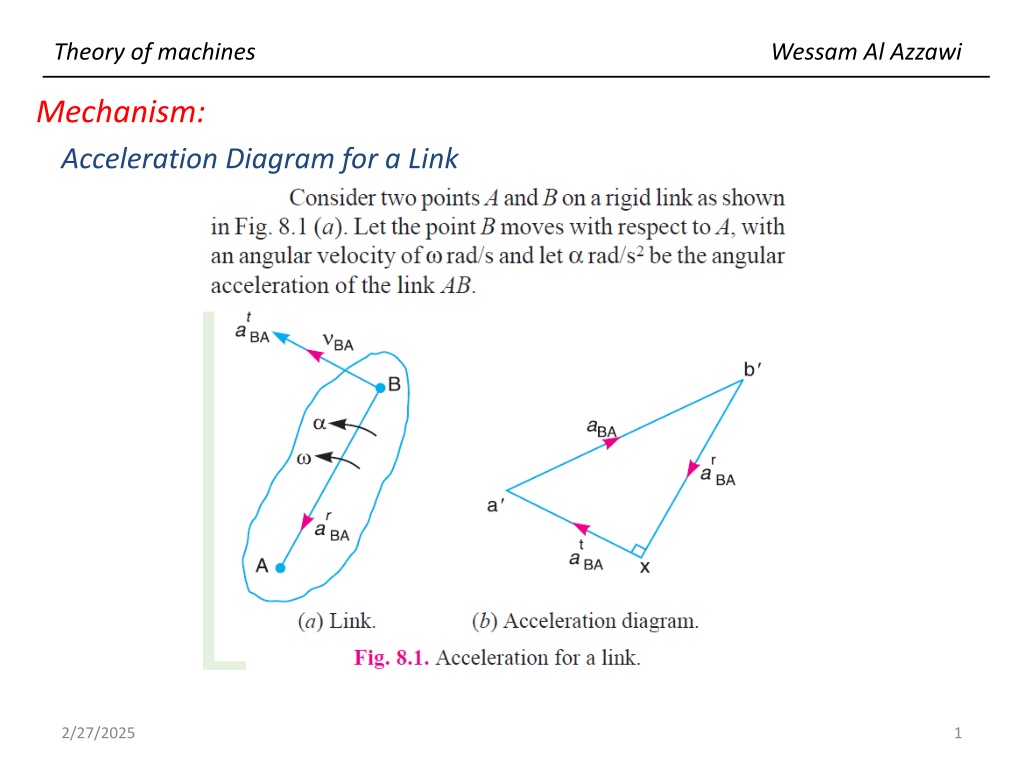
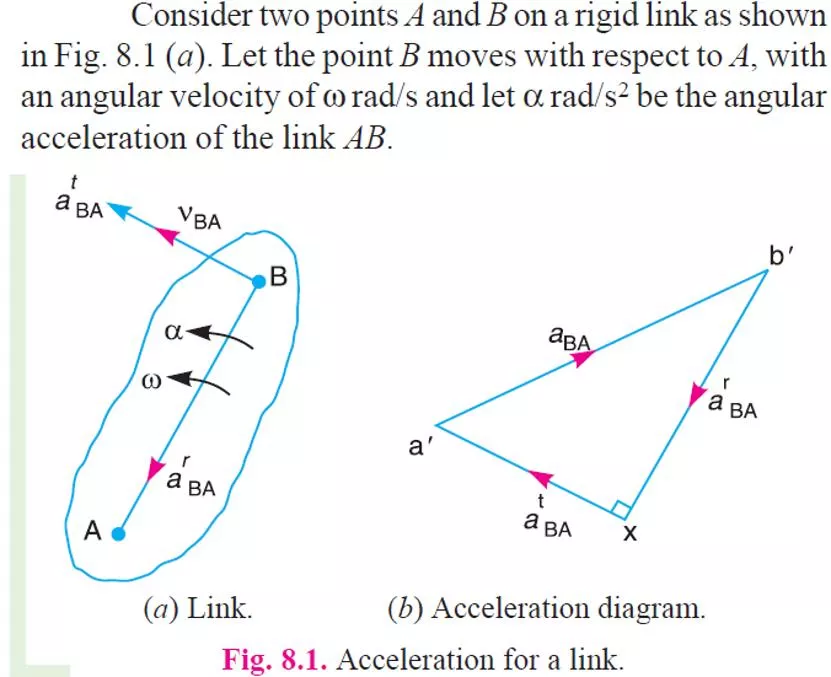
Mechanism:
Acceleration Diagram for a Link
1
2/27/2025


Theory of machines
Wessam Al Azzawi
Mechanism:
Acceleration Diagram for a Link
2
2/27/2025

Theory of machines
Wessam Al Azzawi
Mechanism:
3
2/27/2025
Theory of machines
Wessam Al Azzawi
Mechanism:
Acceleration of a Point on a Link
4
2/27/2025
Theory of machines
Wessam Al Azzawi
Mechanism:
2.
We know that the acceleration of B with respect to A i.e. a
BA
has the
following two components:
a.
Radial component of the acceleration of B with respect to A i.e. a
r
AB
b.
Tangential component of the acceleration B with respect to A i.e.
a
t
AB
. These two components are mutually perpendicular.
3.
Draw vector a'x parallel to the link AB (because radial component of
the acceleration of B with respect to A will pass through AB), such that
4.
From point x, draw vector xb‘ perpendicular to AB or vector a'x
(because tangential component of B with respect to A i.e. a
t
BA
, is
perpendicular to radial component a
r
BA
) and through o' draw a line
parallel to the path of B to represent the absolute acceleration of B i.e.
a
B
. The vectors xb' and o' b' intersect at b'. Now the values of a
B
and
a
t
BA
may be measured, to the scale.
5.
By joining the points a' and b' we may determine the total acceleration
of B with respect to A i.e. a
BA
. The vector a' b' is known as acceleration
image of the link AB.
5
2/27/2025
Theory of machines
Wessam Al Azzawi
Mechanism:
6.
For any other point C on the link, draw triangle a' b' c' similar to
triangle ABC. Now vector b' c' represents the acceleration of C with
respect to B i.e. a
CB
, and vector a' c' represents the acceleration of C
with respect to A i.e. a
CA
. As discussed above, a
CB
and a
CA
will each have
two components as follows :
a.
a
CB
has two components; a
r
CB
and at
CB
as shown by triangle b' zc'
in Fig. (b), in which b' z is parallel to BC and zc' is perpendicular
to b'z or BC.
b.
a
CA
has two components ; a
r
CA
and a
t
CA
as shown by triangle a'
yc' in Fig. (b), in which a' y is parallel to AC and yc' is
perpendicular to a' y or AC.
7.
The angular acceleration of the link AB is obtained by dividing the
tangential components of the acceleration of B with respect to A (a
t
BA
)
to the length of the link. Mathematically, angular acceleration of the
link AB,
6
2/27/2025
Theory of machines
Wessam Al Azzawi
Mechanism:
Acceleration in the Slider Crank Mechanism
A slider crank mechanism is shown in Fig, Let the crank OB makes an angle θ with the
inner dead centre (I.D.C) and rotates in a clockwise direction about the fixed point O
with uniform angular velocity ω
BO
rad/s.
∴
Velocity of B with respect to O or velocity of B (because O is a fixed point),
7
2/27/2025
Theory of machines
Wessam Al Azzawi
Mechanism:
The acceleration diagram, as shown in Fig.(b), may now be drawn as discussed below:
8
2/27/2025
Theory of machines
Wessam Al Azzawi
Mechanism:
9
2/27/2025
Theory of machines
Wessam Al Azzawi
Mechanism:
10
2/27/2025
Theory of machines
Wessam Al Azzawi
Mechanism:
11
2/27/2025
Theory of machines
Wessam Al Azzawi
Mechanism:
12
2/27/2025
1.
Draw vector
ob
perpendicular to
BO
, to some suitable scale, to represent the velocity
of
B
with respect to
O
or simply velocity of B i.e.
v
BO
or
v
B
, such that
2.
From point
b
, draw
ba
perpendicular to
BA
to represent the velocity of
A
with respect
to
B i.e. v
AB
, and from point
o
draw vector
oa
parallel to the motion of
A
to represent
the velocity of
A i.e. v
A
. The vectors
ba
and
oa
intersect at
a
.
Theory of machines
Wessam Al Azzawi
Mechanism:
13
2/27/2025
3.
In order to find the velocity of the midpoint
D
of the connecting rod
AB
, divide the
vector
ba
at
d
in the same ratio as
D
divides
AB
4.
Join
od
. Now the vector
od
represents the velocity of the midpoint
D
of
i.e. v
D
.
By measurement, we find that
v
D
= vector
od
= 4.1 m/s
Ans
.
Theory of machines
Wessam Al Azzawi
Mechanism:
14
2/27/2025
We know that the radial component of the acceleration of
B
with respect to
O
or the
acceleration of
B
,
Theory of machines
Wessam Al Azzawi
Mechanism:
15
2/27/2025
Theory of machines
Wessam Al Azzawi
Mechanism:
16
2/27/2025
Theory of machines
Wessam Al Azzawi
Mechanism:
17
2/27/2025
Theory of machines
Wessam Al Azzawi
Mechanism:
18
2/27/2025
Theory of machines
Wessam Al Azzawi
Mechanism:
19
2/27/2025
Theory of machines
Wessam Al Azzawi
Mechanism:
20
2/27/2025
Theory of machines
Wessam Al Azzawi
Mechanism:
21
2/27/2025
Theory of machines
Wessam Al Azzawi
Mechanism:
22
2/27/2025
Theory of machines
Wessam Al Azzawi
Mechanism:
23
2/27/2025
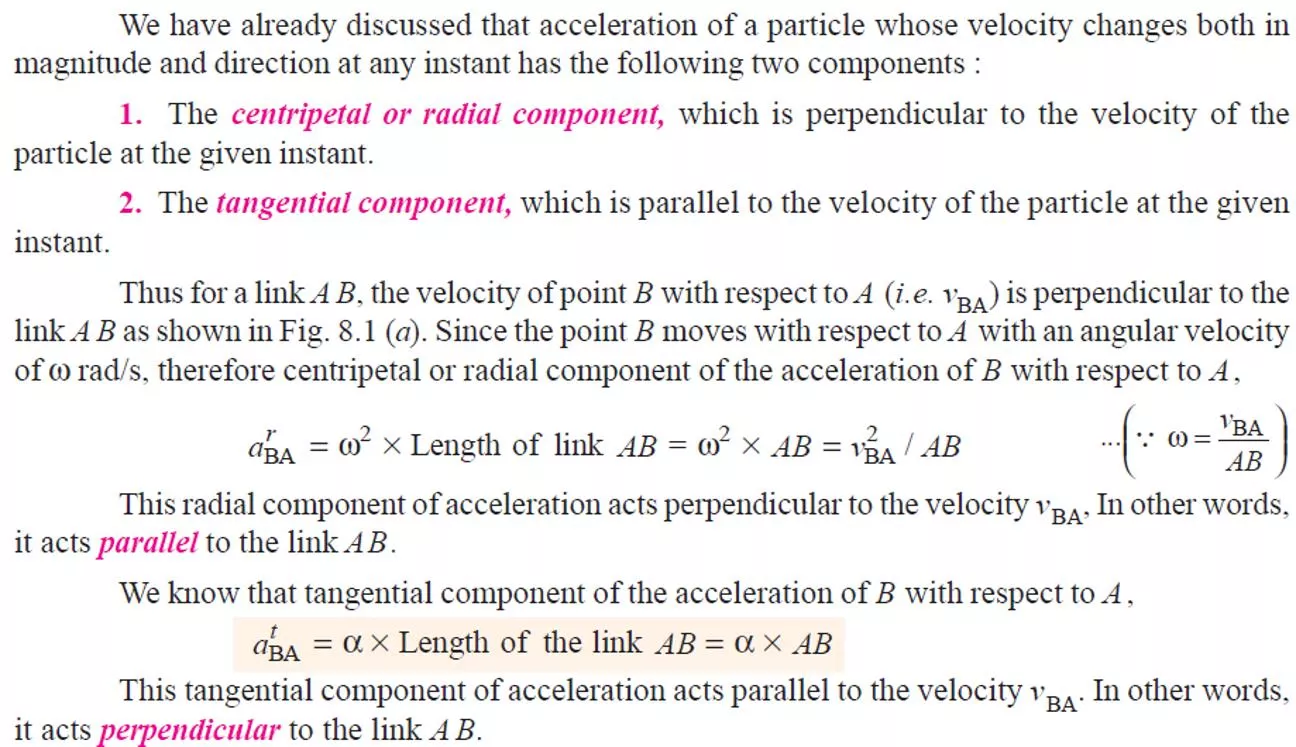
Understanding acceleration components in mechanisms, this content explains concepts like radial and tangential accelerations to illustrate motion in linkages. It also discusses angular acceleration. Images are included to aid comprehension.

Uploaded on Feb 27, 2025 | 0 Views
Download Presentation

Please find below an Image/Link to download the presentation.
The content on the website is provided AS IS for your information and personal use only. It may not be sold, licensed, or shared on other websites without obtaining consent from the author.If you encounter any issues during the download, it is possible that the publisher has removed the file from their server.
You are allowed to download the files provided on this website for personal or commercial use, subject to the condition that they are used lawfully. All files are the property of their respective owners.
The content on the website is provided AS IS for your information and personal use only. It may not be sold, licensed, or shared on other websites without obtaining consent from the author.
E N D
Presentation Transcript
Theory of machines Wessam Al Azzawi Mechanism: Acceleration Diagram for a Link 2/27/2025 1
Theory of machines Wessam Al Azzawi Mechanism: Acceleration Diagram for a Link 2/27/2025 2
Theory of machines Wessam Al Azzawi Mechanism: 2/27/2025 3
Theory of machines Wessam Al Azzawi Mechanism: Acceleration of a Point on a Link 2/27/2025 4
Theory of machines Wessam Al Azzawi Mechanism: 2. We know that the acceleration of B with respect to A i.e. aBA has the following two components: a. Radial component of the acceleration of B with respect to A i.e. arAB b. Tangential component of the acceleration B with respect to A i.e. atAB. These two components are mutually perpendicular. 3. Draw vector a'x parallel to the link AB (because radial component of the acceleration of B with respect to A will pass through AB), such that 4. From point x, draw vector xb perpendicular to AB or vector a'x (because tangential component of B with respect to A i.e. atBA , is perpendicular to radial component arBA) and through o' draw a line parallel to the path of B to represent the absolute acceleration of B i.e. aB. The vectors xb' and o' b' intersect at b'. Now the values of aB and atBA may be measured, to the scale. By joining the points a' and b' we may determine the total acceleration of B with respect to A i.e. aBA. The vector a' b' is known as acceleration image of the link AB. 5. 2/27/2025 5
Theory of machines Wessam Al Azzawi Mechanism: 6. For any other point C on the link, draw triangle a' b' c' similar to triangle ABC. Now vector b' c' represents the acceleration of C with respect to B i.e. aCB, and vector a' c' represents the acceleration of C with respect to A i.e. aCA. As discussed above, aCB and aCA will each have two components as follows : a. aCB has two components; arCB and atCB as shown by triangle b' zc' in Fig. (b), in which b' z is parallel to BC and zc' is perpendicular to b'z or BC. b. aCA has two components ; arCA and at CA as shown by triangle a' yc' in Fig. (b), in which a' y is parallel to AC and yc' is perpendicular to a' y or AC. 7. The angular acceleration of the link AB is obtained by dividing the tangential components of the acceleration of B with respect to A (atBA ) to the length of the link. Mathematically, angular acceleration of the link AB, 2/27/2025 6
Theory of machines Wessam Al Azzawi Mechanism: Acceleration in the Slider Crank Mechanism A slider crank mechanism is shown in Fig, Let the crank OB makes an angle with the inner dead centre (I.D.C) and rotates in a clockwise direction about the fixed point O with uniform angular velocity BO rad/s. Velocity of B with respect to O or velocity of B (because O is a fixed point), 2/27/2025 7
Theory of machines Wessam Al Azzawi Mechanism: The acceleration diagram, as shown in Fig.(b), may now be drawn as discussed below: 2/27/2025 8
Theory of machines Wessam Al Azzawi Mechanism: 2/27/2025 9
Theory of machines Wessam Al Azzawi Mechanism: 2/27/2025 10
Theory of machines Wessam Al Azzawi Mechanism: 2/27/2025 11
Theory of machines Wessam Al Azzawi Mechanism: 1. Draw vector ob perpendicular to BO, to some suitable scale, to represent the velocity of B with respect to O or simply velocity of B i.e. vBO or vB, such that 2. From point b, draw ba perpendicular to BA to represent the velocity of A with respect to B i.e. vAB , and from point o draw vector oa parallel to the motion of A to represent the velocity of A i.e. vA. The vectors ba and oa intersect at a. 2/27/2025 12
Theory of machines Wessam Al Azzawi Mechanism: 3. In order to find the velocity of the midpoint D of the connecting rod AB, divide the vector ba at d in the same ratio as D divides AB 4. Join od. Now the vector od represents the velocity of the midpoint D of i.e. vD. By measurement, we find that vD = vector od = 4.1 m/s Ans. 2/27/2025 13
Theory of machines Wessam Al Azzawi Mechanism: We know that the radial component of the acceleration of B with respect to O or the acceleration of B, 2/27/2025 14
Theory of machines Wessam Al Azzawi Mechanism: 2/27/2025 15
Theory of machines Wessam Al Azzawi Mechanism: 2/27/2025 16
Theory of machines Wessam Al Azzawi Mechanism: 2/27/2025 17
Theory of machines Wessam Al Azzawi Mechanism: 2/27/2025 18
Theory of machines Wessam Al Azzawi Mechanism: 2/27/2025 19
Theory of machines Wessam Al Azzawi Mechanism: 2/27/2025 20
Theory of machines Wessam Al Azzawi Mechanism: 2/27/2025 21
Theory of machines Wessam Al Azzawi Mechanism: 2/27/2025 22
Theory of machines Wessam Al Azzawi Mechanism: 2/27/2025 23