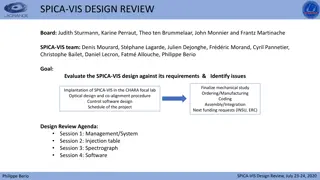
TEAM SEVEN CRITICAL DESIGN REVIEW.
TEAM SEVEN CRITICAL
DESIGN REVIEW
1
Sponsor
Mr. John
Mah
Advisors
Professor Mah
Professor Rafi
Hunter Ray
TEAM SEVEN
Ty Banach, Maklen Estrada, Max Gerber, Sam Hatton, Alex Hubben,
Collin Hudson, Mike Miller, Kevin Pipich, Bennett Spengler, Ethan Temby,
Alessandro Villain, Jacob Wilson
Critical Project Elements
and Risks
AGENDA
03
PROJECT PURPOSE
PROJECT OVERVIEW
o
Establish communications in remote
areas
o
Lack of low-cost, energy efficient
unmanned ariel systems (UAS)
o
Limited emergency personnel
o
COTS autopilot/ground station
software not tailored for long
endurance missions
o
Improve mission endurance
o
Reduce user workload by providing
an optimized flight path
o
Upgrade the native autopilot to fly a
control architecture more optimal for
this type of mission
4
5
DESIGN SOLUTION
SUBSYSTEMS & MAJOR PROJECT ELEMENTS
Mission Management
o
Simulink/MAVLINK/ROS 2
o
Ground Station
o
Custom Algorithms
Flight Controls
o
On-Board Computer
o
ROS 2 Integration with PX4
o
2nd Level Controls using LQR
o
Pixhawk Flight Controller
Hardware
o
Airframe – Phoenix 2400
o
Battery/ESC/Servos/Wires
o
Transmitter/Receiver
o
Motor/Propellor
Flight Trajectory Based on
Energy State
Development of
Stability Augmentation System
Flight Hardware and
Communications
7
HIGH LEVEL SYSTEMS ARCHITECTURE
8
9
MISSION MANAGEMENT P.F.D.
FLIGHT CONTROLS DIAGRAM
10
HARDWARE FBD
11
COMMUNICATION LINKS
12
AIRFRAME SENSOR SUITE
13
POWER MANAGEMENT
14
CRITICAL PROJECT ELEMENTS AND RISKS
CRITICAL PROJECT ELEMENTS
Energy
Management
Stability
Augmentation
System
Flight
Boundaries
Wind
Measurements
o
Primary goal of
the mission
o
Considered in
each subsystem
o
Necessary for
implementing
flight trajectory
o
Simplifies user
input and
improves safety
o
Necessary safety
consideration
o
Preserve LOS,
ensure safe flight
by not crashing
o
Measuring wind is
complex
o
Optimization is
wind dependent
o
Critical to success
of mission
16
*Functional Requirements are in backup slides
RISK SUMMARY
ROS2 Control Law
Implementation
Flight Condition
Execution
Predominant Wind
Estimation
o
If
ROS2 control laws
cannot be implemented
interfaced with existing
PX4 code,
o
Then
there will be
significant design rework
involved in restructuring
PX4 code.
o
If
the waypoints
commanded by mission
management includes
added parameters,
o
Then
flight control laws
will have to be
developed to meet
these additional
constraints.
o
If
reliable wind estimates
cannot be obtained,
o
Then
flight condition
optimization may result in
limited improvement in
terms of energy
consumption.
Risk 1
Risk 2
Risk 3
17
RISK SCORING
R1
R3
R2
*Overall impact score is determined by the
maximum of cost/technical/schedule
18
DESIGN REQUIREMENTS AND THEIR SATISFACTION
Purpose
DESIGN ASPECTS: OUTER LOOP
20
o
Live path optimization
o
Update path
characteristics while in
flight
o
Desired velocity and
shape
o
Based on wind speed
and direction
KEY DESIGN REQUIREMENTS: OUTER LOOP
21
TEMPEST POWER & ENERGY MODEL
AIRCRAFT PERFORMANCE: GENERAL
22
TEMPEST POWER & ENERGY MODEL
AIRCRAFT PERFORMANCE: POWER CURVES
23
Assumptions
:
•
Baseline flight: SLUF @ 50% throttle
•
15° pitch propeller (typical
efficiency curve)
(from drag polar)
propeller
efficiency
+ 20%
endurance
TEMPEST POWER & ENERGY MODEL
AIRCRAFT PERFORMANCE: WIND
24
PX4 MAVLINK PROTOCOL CONSTRAINT
25
OPTIMIZATION DESIGN CHOICE
WIND TRIANGLE AND GROUND SPEED
26
Goal
:
•
Command
ground speed
such that
airspeed is
constant
•
Full derivation in
backup slides
PATH MODELING
MAXIMIZE TURN RADIUS
27
PATH MODELING
FLYING PARALLEL TO THE WIND
f
Flying parallel to the wind
decreases risk:
•
Lower control surface demand
•
Lower flight controller uncertainty
•
Lower impact from wind
changes
Goal
: Avoid side-slip and crab
flight!
28
PATH MODELING
FLYING PARALLEL TO THE WIND
29
OPTIMIZATION DESIGN CHOICE
WIND TRIANGLE FLIGHT & PATH MODIFICATIONS
30
DESIGN ASPECTS: INNER LOOP
31
o
Efficient execution of
waypoint path
o
Generate attitude
setpoints throughout flight
o
Replace existing PX4
loops
o
ROS2 compatibility with
PX4
Purpose
KEY DESIGN REQUIREMENTS: INNER LOOP
32
CONTROL ARCHITECTURE MODEL
33
2nd Order Phugoid Approximation
Assumptions
o
The state of the aircraft experiencing a
disturbance from SLUF can be modelled by a
2
nd
order approximation of aircraft modes.
o
The aircraft state is characterized by the
inertial velocity vector in the body x
direction u
E
, and the pitch angle theta.
o
To inform our control
architecture trade,
and evaluate what
we can control
Goal
CONTROL ARCHITECTURE MODEL
34
CONTROL ARCHITECTURE MODEL
35
Outcomes
o
Model and architecture trade
reduced design space, with
Linear-Quadratic Regulator (LQR)
being our chosen architecture.
o
Successfully controlled changes in
state and rejected disturbances
using LQR
o
Better suited for setpoint control
PX4 POSITION CONTROLLER
36
Fixed Wing Position Controller
o
Position commands to attitude and
thrust commands using PID
o
Calculates KE and PE of aircraft and
attempts to remain at a specific energy
level (KE + PE)
Attitude Controller
o
Attitude and thrust to control surface
deflection commands
o
Handles turn coordination and mode
damping
INNER LOOP: DESIGN CHOICE
37
Replace Position Controller
o
Replace TECS control architecture
with LQR controller
o
TECS controls for unwanted factors,
wasting energy
o
LQR can optimize for model
converting waypoints to setpoints
o
More impactful energy savings
o
LQR controller implemented on
ROS2 onboard computer
VERIFICATION AND VALIDATION
PX4 WIND ESTIMATION
CHARACTERIZATION TEST
39
o
Validation of method
to use wind to fly at
P
r,min
and align path
with wind direction
o
Testing CPE 4 (Wind
Measurements)
o
Estimate North-East
wind velocity from PX4
o
Validate PX4 wind
measurements against
NOAA GFS (Global
Forecast System) wind
data
o
Pass
: Error between PX4
wind speed
measurements and GFS
wind speed is within +/-
2 m/s & within +/- 22.5°
o
Fail
: Error tolerances not
met
Test Objective
Design Validation/CPE
Pass/Fail Criteria
40
PX4 WIND ESTIMATION
40
41
PX4 WIND ESTIMATION
MEASUREMENTS AND KEY ISSUES
o
PX4 estimates the state of the
aircraft using Extended Kalman
Filtering (EKF)
o
Velocity is used to determine
Equivalent Airspeed (EAS)
o
EAS data used to estimate North-
East Wind Velocity
o
Loss of Data
o
Sensor unable to return data
o
Large State Prediction
Discrepancy
o
Could cause EKF to attempt a
reset of the states with the
sensor observations
Measurements
Key Issues
o
IMU (Inertial Measurement Unit)
o
Measures angular (rotation) rates and
acceleration in aircraft body axis
o
Pitot Tube
o
Measures differential pressure to
determine true airspeed
o
GPS (Global Positioning System)
o
Measures position (latitude, longitude,
altitude) [deg, deg, meters]
o
Ground Station Logging
o
Saves
flight logs to CSV on ground
station computer
42
PX4 WIND ESTIMATION TEST
READINESS
Test Readiness
43
TEST READINESS -- PHOENIX 2400
2.4 M Wingspan
ABS Plastic Hull
4023-1050kV Brushless Motor
Readily Available
Legacy – Free for us
43
PHOENIX 2400 POWER CURVE
CHARACTERIZATION TEST
44
o
Use ideal airspeed to
reduce power in flight
to extend endurance
o
Testing CPE 1 (Energy
Management)
o
Determine power
curve and
minimum
power required
airspeed
o
Verify power curve
model (no drag polar
available for the
Phoenix 2400)
Test Objective
Design Validation/CPE
Pass/Fail Criteria
45
PHOENIX 2400 POWER CURVE
ESTIMATION PROCESS
45
46
PHOENIX 2400 POWER CURVE ESTIMATION
MEASUREMENTS AND KEY ISSUES
o
PX4 Telemetry
o
True airspeed
o
Battery voltage
o
Battery current draw
o
Wind gusts or sudden
changes in wind direction
may yield unwanted
test results
o
Ideally testing on calm
day
Measurements
Key Issues
o
PDB (Power Distribution Board)
o
Measures voltage and current draw from
the battery
o
Most power will be used by the ESC/motor
o
Pitot Tube
o
Measures differential pressure to
determine true airspeed
o
Ground Station Logging
o
Saves
flight logs to CSV on ground station
computer
47
PHEONIX 2400 POWER CURVE ESTIMATION
TEST
READINESS
Test Readiness
48
PX4 WIND ESTIMATION AND PHOENIX POWER CURVE
SAFETY RISKS
o
While taking measurements in
flight, strong wind gust are possible
o
May compromise flight safety and
lead to a crash
Unpredictable Winds
Environmental Safety
o
Fly at lower altitude to closely
monitor flight status (< 6500ft MSL)
o
Avoid flying in extremely turbulent
weather on test day
o
Fly in areas with steady winds
Safety Risk Mitigation Plans
o
Battery ejection could cause fires
in environment near test flight
location
o
Develop protective housing for
battery
o
Confirm with advisor and other
faculty members the safety of the
power management systems prior
to flight
Safety Risk Mitigation Plans
SIMULATION CHARACTERIZATION TEST
49
Test Objective
Design Validation/CPE
Pass/Fail Criteria
o
Pass
: Aircraft reaches
all waypoints within a
20-meter range
o
Fail
: Aircraft does not
reach all waypoints
and/or does not
come within 20-
meter range
o
Send attitude
setpoints and pre-
defined waypoints to
PX4
o
Verify if aircraft
reaches pre-defined
waypoints within a
selected range
o
Validating
:
o
Messaging
reliability
o
Guidance level
loop fidelity
o
Testing CPE 2 (Stability
Augmentation
System)
50
SIMULATION TEST SET UP
50
Output
Input
MAVLink
GAZEBO SIMULATION MEASUREMENTS
AND KEY ISSUES
51
Measurements
Key Issues
Safety Risks
o
No environmental
safety risks
o
Test is only on a
computer
o
No equipment risks
o
Testing software
only
o
State Stream Data
o
Planned
waypoints
o
Simulated aircraft
state
o
Motor and Actuator
outputs
o
PX4 Mode
o
Running in
offboard mode
o
Limited computer
resources
o
Computer must
run
several programs
which may
be resource
intensive
.
o
Gazebo
o
F
ull-function simulator to provide all
necessary inputs
o
Generates simulated sensor data
o
QGroundControl
o
Sends waypoints to PX4 using MAVLink
protocol communication
o
ROS2
o
Send setpoints to PX4 using MAVLink
protocol communication
52
SIMULATION
TEST
READINESS
Test Readiness
PROJECT PLANNING
TEAM SEVEN WORK PLAN
54
= Deliverable
*Dark Colors Represent Margin
COST PLAN
55
COST PLAN
56
56
TEST PLAN
57
57
QUESTIONS
58
TABLE OF CONTENTS
59
o
Project Overview
o
CONOPS
o
Subsystems & Major Elements
o
High Level Systems Architecture
o
Mission Management Diagram
o
Flight Controls Diagram
o
Hardware FBDs
o
Critical Project Elements
o
Risk Summary
o
Risk Matrix
Mission Management Model
Flight Controls Model
o
Key Requirements
o
Power & Energy Model
o
Constraints
o
Path Model
o
Design Choice
o
Design Aspect
o
Key Requirements
o
Control Architecture Model
o
Design Choice
o
Wind Measurement
o
Power Curve
o
Simulation
o
Work Plan
o
Cost Plan
o
Test Plan
TABLE OF CONTENTS (ADDITIONAL SLIDES)
60
o
ROS2 Control Law Implementation
o
Flight Condition Execution
o
Wind Estimation
o
Airframe
o
Flight Controller
o
Companion Computer
o
Power Management Module
o
Battery
o
ESC
o
Digital Airspeed Sensor
o
GPS
o
Transmitter
o
Receiver
o
Telemetry Radios
o
Wind Triangle Derivation
o
Functional Requirements
ADDITIONAL SLIDES
RISKS
RISK SCORING
63
64
65
66
Hardware Selections
67
AIRFRAME: VOLANTEX PHOENIX 2400
•
2.4 M Wingspan
•
ABS Plastic Hull
•
EPO Foam Wings
•
4023-1050kV brushless outrunner
motor
•
Rudder, elevator, aileron, and
flaperon control surfaces
•
6x 9g servos
68
FLIGHT CONTROLLER: PIXHAWK 6C
•
Clock speed of up to 480 MHz
•
Supports both PX4 and ArduPilot
•
Integrated barometer, magnetometer, and
two vibration isolated IMU’s
•
Input voltage of 5.0
±
0.25 V
•
84.8 x 44 x 12.4 mm
•
Integrated package with support for up to 16
PWM outputs
•
I2C, GPS, CAN, Telemetry (Serial), and Debug
Ports
69
COMPANION COMPUTER: BEAGLE BONE BLACK
•
1 GHz processor
•
Input voltage of 5
±
0.25 V
•
512 Mb RAM
•
4 Gb onboard flash storage
•
3.4” by 2.1” PCB
•
Can be loaded with ROS2 using either
Ubuntu Linux or preinstalled Ångström Linux
distribution
•
Ethernet, USB, HDMI, and 2 headers of 46
general purpose input/ output pins
•
GPIO pins can be configured for I2C, SPI, or
UART protocols.
70
POWER MANAGEMENT MODULE: PM02
•
Provides regulated 5.2V to flight controller
•
Input voltage 7-51V
•
Rated current of 60 A
•
Outputs batter voltage to ESC
•
Outputs current and voltage
measurements to flight controller
71
BATTERY: ZEEE 11.1V 3200MAH
•
11.1 V
•
3200 mAh
•
50 C discharge
•
XT-60 will be soldered on for power
module interface
72
ESC: 40A ESC W/ 5V UBEC
•
Provides regulated 5V power to motor
and servos through UBEC output
•
Interfaces with power distribution module
through XT-60 Connection
•
3A UBEC to power servos
•
6.4V-16.8V input voltage
•
3x bullet plugs for motor connection
73
DIGITAL AIRSPEED SENSOR
•
HolyBro Airspeed
•
UART Connection
•
Resolution < 1Pa
•
= .1m/s@10m/s or .06m/s @ 20m/s
•
Max pressure 6800Pa ~ 100 m/s
74
GPS: HOLYBRO M8N
•
2.5 m position accuracy
•
0.05 m/s speed accuracy
•
GPS, GLONASS, and Galileo support
•
Input voltage 4.7-5.2 V
•
Direct integration with Pixhawk 6C through
designated port
•
Can be purchased as bundle with Pixhawk 6C
75
TRANSMITTER: RADIOMASTER TX16S MARK II
•
Multi protocol support
•
16 inputs, visual interface
•
Telemetry enabled
•
Completely customizable outputs and
mixing
•
Ramps for changing input sensitivity
•
Open source software
•
Module port on back for TBS Crossfire
or alternative protocol/antennas
•
LUA scripting for any future needs.
76
RECEIVER: FRSKY S8R
•
16 Channel Receiver
•
Interface with flight controller though Serial Bus
•
Allows one wire to communicate all channels
•
Optional Flight stabilization modes with in-flight
gain tuning through channel 9
•
Uses FRSKY ACCST protocol
77
TELEMETRY RADIOS: HOLYBRO SIK V3
•
Two frequency options (915 MHz and 433 MHZ)
•
Powered directly through Pixhawk
•
MAVLINK Protocol Framing
•
28 x 53 x 10.7mm (without antenna)
78
79
WIND
TRIANGLE
DERIVATION
FUNCTIONAL REQUIREMENTS
80
INNER LOOP: DESIGN CHOICE
81
Communication
o
Send waypoint data via MAVLINK
protocol
o
Native support with ROS2
o
Send attitude setpoints via
MAVROS from onboard computer
o
Native support with PX4
o
Frequency of setpoint transmission
must be greater than 2 Hz
During the critical design review, Team Seven presented their project purpose, objectives, and key elements related to developing an energy-efficient unmanned aerial system (UAS). The project aims to improve mission endurance, reduce user workload, and enhance communications in remote areas. By focusing on subsystems such as mission management, flight controls, hardware development, and flight trajectory optimization, the team is working towards a tailored solution to meet project requirements and address critical risks.

Download Presentation

Please find below an Image/Link to download the presentation.
The content on the website is provided AS IS for your information and personal use only. It may not be sold, licensed, or shared on other websites without obtaining consent from the author. Download presentation by click this link. If you encounter any issues during the download, it is possible that the publisher has removed the file from their server.
E N D
Presentation Transcript
TEAM SEVEN CRITICAL DESIGN REVIEW 1 Advisors Professor Mah Professor Rafi Hunter Ray TEAM SEVEN Sponsor Mr. John Mah Ty Banach, Maklen Estrada, Max Gerber, Sam Hatton, Alex Hubben, Collin Hudson, Mike Miller, Kevin Pipich, Bennett Spengler, Ethan Temby, Alessandro Villain, Jacob Wilson
AGENDA 03 01 02 Critical Project Elements and Risks Project Purpose Design Solution 04 05 06 Design Requirements and Their Satisfaction Verification and Validation Project Planning Design Solution Design Requirements Project Purpose Critical Elements and Risk Project Planning Verification and Validation
PROJECT OVERVIEW Problem TEAM SEVEN Objectives Program (HERD-CU) o Establish communications in remote areas Develop energy management solution based on mission trajectory o Lack of low-cost, energy efficient unmanned ariel systems (UAS) o Improve mission endurance o Reduce user workload by providing an optimized flight path o Limited emergency personnel Project (TEAM SEVEN) Enable trajectory solution via attitude control o COTS autopilot/ground station software not tailored for long endurance missions o Upgrade the native autopilot to fly a control architecture more optimal for this type of mission 4 Project Purpose Design Requirements Design Solution Verification and Validation Project Planning Critical Elements and Risk
5 Project Purpose Design Requirements Design Solution Verification and Validation Project Planning Critical Elements and Risk
SUBSYSTEMS & MAJOR PROJECT ELEMENTS Mission Management Flight Controls Hardware Flight Trajectory Based on Energy State Flight Hardware and Communications Development of Stability Augmentation System Simulink/MAVLINK/ROS 2 On-Board Computer Airframe Phoenix 2400 o o o Ground Station ROS 2 Integration with PX4 o 2nd Level Controls using LQR Pixhawk Flight Controller Battery/ESC/Servos/Wires o o o Custom Algorithms Transmitter/Receiver o o o Motor/Propellor o 7 Design Solution Project Purpose Design Requirements Project Planning Critical Elements and Risk Verification and Validation
HIGH LEVEL SYSTEMS ARCHITECTURE 8 Design Solution Project Purpose Design Requirements Project Planning Critical Elements and Risk Verification and Validation
MISSION MANAGEMENT P.F.D. 9 Design Solution Project Purpose Design Requirements Project Planning Critical Elements and Risk Verification and Validation
FLIGHT CONTROLS DIAGRAM Setpoint (attitude and thrust) Waypoint (position and velocity) 10 Design Solution Project Purpose Design Requirements Project Planning Critical Elements and Risk Verification and Validation
HARDWARE FBD 11 Design Solution Project Purpose Design Requirements Project Planning Critical Elements and Risk Verification and Validation
COMMUNICATION LINKS 12 Design Solution Project Purpose Design Requirements Project Planning Critical Elements and Risk Verification and Validation
AIRFRAME SENSOR SUITE 13 Design Solution Project Purpose Design Requirements Project Planning Critical Elements and Risk Verification and Validation
POWER MANAGEMENT 14 Design Solution Project Purpose Design Requirements Project Planning Critical Elements and Risk Verification and Validation
*Functional Requirements are in backup slides CRITICAL PROJECT ELEMENTS Energy Management Stability Augmentation System Flight Wind Boundaries Measurements FR 2 FR 3 FR 6 FR 3 FR 4 FR 6 FR 1 FR 4 FR 5 FR 1 FR 3 FR 5 o Primary goal of the mission o Necessary for implementing flight trajectory o Necessary safety consideration Measuring wind is complex o o Considered in each subsystem o Preserve LOS, ensure safe flight by not crashing Optimization is wind dependent o o Simplifies user input and improves safety Critical to success of mission o 16 Critical Elements and Risk Design Requirements Project Planning Design Solution Verification and Validation Project Purpose
RISK SUMMARY Risk 1 Risk 2 Risk 3 Predominant Wind Estimation Flight Condition Execution ROS2 Control Law Implementation o If ROS2 control laws cannot be implemented interfaced with existing PX4 code, o Then there will be significant design rework involved in restructuring PX4 code. o If the waypoints commanded by mission management includes added parameters, o Then flight control laws will have to be developed to meet these additional constraints. o If reliable wind estimates cannot be obtained, o Then flight condition optimization may result in limited improvement in terms of energy consumption. 17 Critical Elements and Risk Design Requirements Project Planning Design Solution Verification and Validation Project Purpose
RISK SCORING Probability: 2 Cost: 1 Technical: 3 Schedule: 1 Total: 6 R1: ROS2 Control Law Implementation 4 8 12 16 R2 Impact 3 6 9 12 Probability: 2 Cost: 1 Technical: 4 Schedule: 3 Total: 8 R2: Flight Condition Execution R1 R3 2 4 6 8 1 2 3 4 Probability: 3 Cost: 1 Technical: 3 Schedule: 2 Total: 9 R3: Predominant Wind Estimation Probability *Overall impact score is determined by the maximum of cost/technical/schedule 18 Critical Elements and Risk Design Requirements Project Planning Design Solution Verification and Validation Project Purpose
DESIGN ASPECTS: OUTER LOOP Purpose oLive path optimization o Update path characteristics while in flight o Desired velocity and shape o Based on wind speed and direction 20 Design Requirements Verification and Validation Project Planning Design Solution Project Purpose Critical Elements and Risk
KEY DESIGN REQUIREMENTS: OUTER LOOP Design Requirement 1.6 2.1 2.2 2.3 6.1 Ground station capable of transmitting flight plan to UAS Utilize Utilized existing off- the-shelf and natively developed software 20% increase in endurance compared to baseline flight profile Generate set of waypoints for a given UAS mission downlinked telemetry to develop optimized flight plan Description 21 Design Requirements Verification and Validation Project Planning Design Solution Project Purpose Critical Elements and Risk
TEMPEST POWER & ENERGY MODEL AIRCRAFT PERFORMANCE: GENERAL DR 2.1 22 Design Requirements Verification and Validation Project Planning Design Solution Project Purpose Critical Elements and Risk
TEMPEST POWER & ENERGY MODEL AIRCRAFT PERFORMANCE: POWER CURVES DR 2.1 (from drag polar) propeller efficiency + 20% endurance Assumptions: Baseline flight: SLUF @ 50% throttle 15 pitch propeller (typical efficiency curve) 23 Design Requirements Verification and Validation Project Planning Design Solution Project Purpose Critical Elements and Risk
TEMPEST POWER & ENERGY MODEL AIRCRAFT PERFORMANCE: WIND DR 2.1 24 Design Requirements Verification and Validation Project Planning Design Solution Project Purpose Critical Elements and Risk
PX4 MAVLINK PROTOCOL CONSTRAINT DR 1.6 DR 6.1 25 Design Requirements Verification and Validation Project Planning Design Solution Project Purpose Critical Elements and Risk
OPTIMIZATION DESIGN CHOICE WIND TRIANGLE AND GROUND SPEED DR 2.2 Goal: Command ground speed such that airspeed is constant Full derivation in backup slides 26 Design Requirements Verification and Validation Project Planning Design Solution Project Purpose Critical Elements and Risk
PATH MODELING MAXIMIZE TURN RADIUS 27 Design Requirements Verification and Validation Project Planning Design Solution Project Purpose Critical Elements and Risk
PATH MODELING FLYING PARALLEL TO THE WIND Flying parallel to the wind decreases risk: Lower control surface demand Lower flight controller uncertainty Lower impact from wind changes f Goal: Avoid side-slip and crab flight! 28 Design Requirements Verification and Validation Project Planning Design Solution Project Purpose Critical Elements and Risk
PATH MODELING FLYING PARALLEL TO THE WIND 29 Design Requirements Verification and Validation Project Planning Design Solution Project Purpose Critical Elements and Risk
OPTIMIZATION DESIGN CHOICE WIND TRIANGLE FLIGHT & PATH MODIFICATIONS DR 2.2 DR 2.3 DR 6.1 30 Design Requirements Verification and Validation Project Planning Design Solution Project Purpose Critical Elements and Risk
DESIGN ASPECTS: INNER LOOP Purpose oEfficient execution of waypoint path o Generate attitude setpoints throughout flight o Replace existing PX4 loops o ROS2 compatibility with PX4 Setpoint (attitude and thrust) Waypoint (position and velocity) 31 Design Requirements Verification and Validation Project Planning Design Solution Project Purpose Critical Elements and Risk
KEY DESIGN REQUIREMENTS: INNER LOOP Design Requirement 2.1 3.1 5.3 6.1 Autonomous flight for all phases of flight except launch and landing. Utilize existing off-the-shelf and natively developed software 20% increase in endurance compared to baseline flight profile Follow a set of predefined waypoints. Description 32 Design Requirements Verification and Validation Project Planning Design Solution Project Purpose Critical Elements and Risk
CONTROL ARCHITECTURE MODEL Goal Assumptions o The state of the aircraft experiencing a disturbance from SLUF can be modelled by a 2nd order approximation of aircraft modes. o To inform our control architecture trade, and evaluate what we can control o The aircraft state is characterized by the inertial velocity vector in the body x direction uE, and the pitch angle theta. 2nd Order Phugoid Approximation 33 Design Requirements Verification and Validation Project Planning Design Solution Project Purpose Critical Elements and Risk
CONTROL ARCHITECTURE MODEL 34 Design Requirements Verification and Validation Project Planning Design Solution Project Purpose Critical Elements and Risk
CONTROL ARCHITECTURE MODEL Outcomes o Model and architecture trade reduced design space, with Linear-Quadratic Regulator (LQR) being our chosen architecture. o Successfully controlled changes in state and rejected disturbances using LQR o Better suited for setpoint control 35 Design Requirements Verification and Validation Project Planning Design Solution Project Purpose Critical Elements and Risk
PX4 POSITION CONTROLLER Fixed Wing Position Controller o Position commands to attitude and thrust commands using PID o Calculates KE and PE of aircraft and attempts to remain at a specific energy level (KE + PE) Attitude Controller o Attitude and thrust to control surface deflection commands o Handles turn coordination and mode damping 36 Design Requirements Verification and Validation Project Planning Design Solution Project Purpose Critical Elements and Risk
INNER LOOP: DESIGN CHOICE Replace Position Controller o Replace TECS control architecture with LQR controller o TECS controls for unwanted factors, wasting energy o LQR can optimize for model converting waypoints to setpoints o More impactful energy savings o LQR controller implemented on ROS2 onboard computer 37 Design Requirements Verification and Validation Project Planning Design Solution Project Purpose Critical Elements and Risk
39 PX4 WIND ESTIMATION CHARACTERIZATION TEST Design Validation/CPE Pass/Fail Criteria Test Objective o Validation of method to use wind to fly at Pr,min and align path with wind direction o Estimate North-East wind velocity from PX4 o Pass: Error between PX4 wind speed measurements and GFS wind speed is within +/- 2 m/s & within +/- 22.5 o Validate PX4 wind measurements against NOAA GFS (Global Forecast System) wind data o Testing CPE 4 (Wind Measurements) o Fail: Error tolerances not met Verification and Validation Project Planning Design Solution Design Requirements Project Purpose Critical Elements and Risk
40 PX4 WIND ESTIMATION 40 Verification and Validation Project Planning Design Solution Design Requirements Project Purpose Critical Elements and Risk
PX4 WIND ESTIMATION MEASUREMENTS AND KEY ISSUES Key Issues Measurements o PX4 estimates the state of the aircraft using Extended Kalman Filtering (EKF) o Loss of Data o Sensor unable to return data o Large State Prediction Discrepancy o Velocity is used to determine Equivalent Airspeed (EAS) o Could cause EKF to attempt a reset of the states with the sensor observations o EAS data used to estimate North- East Wind Velocity 41 Verification and Validation Project Planning Design Solution Design Requirements Project Purpose Critical Elements and Risk
PX4 WIND ESTIMATION TEST READINESS Test Readiness o IMU (Inertial Measurement Unit) o Measures angular (rotation) rates and acceleration in aircraft body axis o Pitot Tube o Measures differential pressure to determine true airspeed o GPS (Global Positioning System) o Measures position (latitude, longitude, altitude) [deg, deg, meters] o Ground Station Logging o Saves flight logs to CSV on ground station computer 42 Verification and Validation Project Planning Design Solution Design Requirements Project Purpose Critical Elements and Risk
TEST READINESS -- PHOENIX 2400 2.4 M Wingspan ABS Plastic Hull 4023-1050kV Brushless Motor Readily Available Legacy Free for us 43 43 Verification and Validation Project Planning Design Solution Design Requirements Project Purpose Critical Elements and Risk
44 PHOENIX 2400 POWER CURVE CHARACTERIZATION TEST Design Validation/CPE Pass/Fail Criteria Test Objective o Pass: Power curve has an ?2 0.85 to a nonlinear fit curve o Use ideal airspeed to reduce power in flight to extend endurance o Determine power curve and minimum power required airspeed o Fail: Error exceeds an ?2 of 0.85 o Testing CPE 1 (Energy Management) o Verify power curve model (no drag polar available for the Phoenix 2400) Verification and Validation Project Planning Design Solution Design Requirements Project Purpose Critical Elements and Risk
PHOENIX 2400 POWER CURVE ESTIMATION PROCESS 45 45 Verification and Validation Project Planning Design Solution Design Requirements Project Purpose Critical Elements and Risk
PHOENIX 2400 POWER CURVE ESTIMATION MEASUREMENTS AND KEY ISSUES Key Issues Measurements oPX4 Telemetry oTrue airspeed oBattery voltage oBattery current draw oWind gusts or sudden changes in wind direction may yield unwanted test results oIdeally testing on calm day 46 Verification and Validation Project Planning Design Solution Design Requirements Project Purpose Critical Elements and Risk
PHEONIX 2400 POWER CURVE ESTIMATION TEST READINESS Test Readiness o PDB (Power Distribution Board) o Measures voltage and current draw from the battery o Most power will be used by the ESC/motor o Pitot Tube o Measures differential pressure to determine true airspeed o Ground Station Logging o Saves flight logs to CSV on ground station computer 47 Verification and Validation Project Planning Design Solution Design Requirements Project Purpose Critical Elements and Risk
PX4 WIND ESTIMATION AND PHOENIX POWER CURVE SAFETY RISKS Environmental Safety Unpredictable Winds o While taking measurements in flight, strong wind gust are possible o May compromise flight safety and lead to a crash o Battery ejection could cause fires in environment near test flight location Safety Risk Mitigation Plans Safety Risk Mitigation Plans o Fly at lower altitude to closely monitor flight status (< 6500ft MSL) o Avoid flying in extremely turbulent weather on test day o Fly in areas with steady winds o Develop protective housing for battery o Confirm with advisor and other faculty members the safety of the power management systems prior to flight 48 Verification and Validation Project Planning Design Solution Design Requirements Project Purpose Critical Elements and Risk
49 SIMULATION CHARACTERIZATION TEST Design Validation/CPE Pass/Fail Criteria Test Objective o Validating: o Messaging reliability o Guidance level loop fidelity o Pass: Aircraft reaches all waypoints within a 20-meter range o Send attitude setpoints and pre- defined waypoints to PX4 o Fail: Aircraft does not reach all waypoints and/or does not come within 20- meter range o Verify if aircraft reaches pre-defined waypoints within a selected range o Testing CPE 2 (Stability Augmentation System) Verification and Validation Project Planning Design Solution Design Requirements Project Purpose Critical Elements and Risk
50 SIMULATION TEST SET UP Output Input MAVLink 50 Verification and Validation Project Planning Design Solution Design Requirements Project Purpose Critical Elements and Risk