Using Decision Trees for Program-Based Static Branch Prediction
This presentation discusses the use of decision trees to enhance program-based static branch prediction, focusing on improving the Ball and Larus heuristics. It covers the importance of static branch prediction, motivation behind the research, goals of the study, and background on Ball and Larus heuristics. The paper aims to optimize heuristic application and discover new heuristics for better branch prediction performance.

Download Presentation

Please find below an Image/Link to download the presentation.
The content on the website is provided AS IS for your information and personal use only. It may not be sold, licensed, or shared on other websites without obtaining consent from the author.If you encounter any issues during the download, it is possible that the publisher has removed the file from their server.
You are allowed to download the files provided on this website for personal or commercial use, subject to the condition that they are used lawfully. All files are the property of their respective owners.
The content on the website is provided AS IS for your information and personal use only. It may not be sold, licensed, or shared on other websites without obtaining consent from the author.
E N D
Presentation Transcript
Using Decision Trees to Improve Program-Based Static Branch Prediction Group 25: Nicholas Huang (ncchuang), Alice Ying (acying)
Introduction: What is Static Branch Prediction? Static Branch Prediction: A fixed prediction on whether a branch is 'taken' or 'not taken' Two Types 1. Profile-based a. b. c. 2. Program-based a. Uses structural information of the program b. Cost effective Uses information from previous runs with different inputs High accuracy Think HW 2!
Motivation: Why is Static Branch Prediction Important? Compiler optimizations often depend on accurate branch prediction 1. Instruction Scheduling 2. LLVM 3. Predication 4. Register Allocation Reduces the load on dynamic branch predictors Some embedded microprocessors lack dynamic branch prediction altogether, relying on static branch prediction
Paper Overview Goal 1: Use decision trees to optimize the ordered application of program-based Ball and Larus Heuristics in branch prediction. Goal 2: Use decision trees to find additional heuristics that further improve the performance of Ball and Larus Heuristics.
Background: Ball and Larus Heuristics Heuristic Coverage Compound Coverage Misprediction Rate Loop 35% 35% 19% Pointer 21% 13% 39% Opcode 9% 13% 27% Guard 13% 4.5% 37% Loop Header 26% 7% 25% Call 22% 8% 33% Store 25% 1.5% 48% Return 22% 1% 29%
Background: Ball and Larus Heuristics Heuristic Coverage Compound Coverage Misprediction Rate Optimal Ordering: 31.3 IPM Loop, Pointer, Call, Opcode, Return, Store, Loop Header, Guard Loop 35% 35% 19% 83% Heuristic Coverage 17% Random Prediction Pointer 21% 13% 39% Opcode 9% 13% 27% Guard 13% 4.5% 37% Loop Header 26% 7% 25% Call 22% 8% 33% Store 25% 1.5% 48% Return 22% 1% 29%
Background: Ball and Larus Heuristics Heuristic Coverage Compound Coverage Misprediction Rate Optimal Ordering: 31.3 IPM Loop, Pointer, Call, Opcode, Return, Store, Loop Header, Guard Loop 35% 35% 19% 83% Heuristic Coverage 17% Random Prediction Pointer 21% 13% 39% Opcode 9% 13% 27% Guard 13% 4.5% 37% Not feasible to evaluate all heuristic orderings (takes factorial time) Loop Header 26% 7% 25% Call 22% 8% 33% Store 25% 1.5% 48% Return 22% 1% 29%
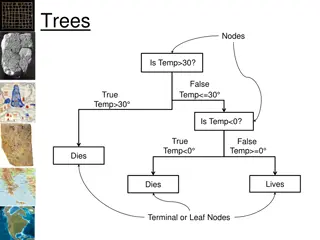
Goal 1: Evaluating and Ordering Ball and Larus Heuristics Loop Benchmark Programs: gzip, vpr, gcc, parser, perl, etc. (16 total) Follow Heuristic Opcode Algorithm For each benchmark: Follow Heuristic Call Follow Heuristic Return 1. Learn a decision tree with Ball and Larus Heuristics as nodes using information from other 15 benchmarks 2. Cross-validate on the benchmark not included in training Follow Heuristic Loop Header Follow Heuristic Store Follow Heuristic Pointer
Goal 1: Evaluating and Ordering Ball and Larus Heuristics Loop Loop vpr gcc Follow Heuristic Follow Heuristic Call Opcode Follow Heuristic Follow Heuristic Opcode Call Follow Heuristic Follow Heuristic Store Store Follow Heuristic Follow Heuristic Loop Header Loop Header Follow Heuristic Follow Heuristic Return Return Follow Heuristic Follow Heuristic Pointer Pointer
Goal 1: Evaluating and Ordering Ball and Larus Heuristics Loop Loop vpr gcc Follow Heuristic Follow Heuristic Call Opcode Follow Heuristic Follow Heuristic Opcode Call Follow Heuristic Follow Heuristic Store Store Follow Heuristic Follow Heuristic Loop Header Loop Header Follow Heuristic Follow Heuristic Return Return Follow Heuristic Follow Heuristic Pointer Pointer
Goal 1: Results - Optimal Ordering Heuristic Ball and Larus Proposed Decision Tree Optimal Loop Follow Heuristic Loop 35% 35% Opcode Pointer 13% 4% Follow Heuristic Call Opcode 13% 5.5% Follow Heuristic Return Loop Header 7% 4% Follow Heuristic Loop Header Call 8% 16.5% Follow Heuristic Store Store 1.5% 18% Follow Heuristic Return 1% 9% Pointer
Goal 1: Results - Optimal Ordering Heuristic Ball and Larus Proposed Decision Tree Optimal Loop Follow Heuristic Loop 35% 35% Opcode Pointer 13% 4% Follow Heuristic Call Opcode 13% 5.5% Follow Heuristic Return Loop Header 7% 4% Follow Heuristic Loop Header Call 8% 16.5% Follow Heuristic Store Store 1.5% 18% Follow Heuristic Return 1% 9% Pointer
Goal 1: Results - Optimal Ordering Heuristic Ball and Larus Proposed Decision Tree Optimal Loop Follow Heuristic Loop 35% 35% Opcode Pointer 13% 4% Follow Heuristic Call Opcode 13% 5.5% Follow Heuristic Return Loop Header 7% 4% Follow Heuristic Loop Header Call 8% 16.5% Follow Heuristic Store Store 1.5% 18% Follow Heuristic Return 1% 9% Pointer IPM 31.3 32.1
Background: Other Static Features and Heuristics Motivation: Automated ordering means adding heuristics is less computationally expensive (no longer factorial)
Background: Other Static Features and Heuristics Motivation: Automated ordering means adding heuristics is less computationally expensive (no longer factorial) Feature Types 1. Properties of branch's BB
Background: Other Static Features and Heuristics Motivation: Automated ordering means adding heuristics is less computationally expensive (no longer factorial) Feature Types 1. 2. Properties of successor BB Properties of branch's BB
Goal 2: Adding New Heuristics Loop Follow Heuristic Opcode 1. Modify original Ball and Larus Heuristics by... Follow Heuristic Call Follow Heuristic Return Follow Heuristic Loop Header Follow Heuristic Store Follow Heuristic Pointer Original Ball and Larus Heuristics
Goal 2: Adding New Heuristics Loop Follow Heuristic Opcode 1. Modify original Ball and Larus Heuristics by... 2. Add additional heuristics one by one and calculate prediction accuracy Follow Heuristic Call Follow Heuristic Return Follow Heuristic Loop Header Follow Heuristic Store Follow Heuristic Pointer Follow Heuristic Post Dominator True False not-taken taken
Goal 2: Adding New Heuristics Loop Follow Heuristic Opcode 1. Modify original Ball and Larus Heuristics by... 2. Add additional heuristics one by one and calculate prediction accuracy Follow Heuristic Call Follow Heuristic Return Follow Heuristic Loop Header Follow Heuristic Store Follow Heuristic Pointer Follow Heuristic Dep Distance not short short not-taken taken
Goal 2: Adding New Heuristics Loop Follow Heuristic Opcode 1. Modify original Ball and Larus Heuristics by... 2. Add additional heuristics one by one and calculate prediction accuracy Follow Heuristic Call Follow Heuristic Return Follow Heuristic Loop Header Follow Heuristic Store Follow Heuristic Pointer ... (for all features ) Follow Heuristic Dep Distance not short short not-taken taken
Goal 2: Adding New Heuristics Loop Follow Heuristic Opcode 1. Modify original Ball and Larus Heuristics by... 2. Add additional heuristics one by one and calculate prediction accuracy 3. Permanently include heuristic with highest prediction accuracy Follow Heuristic Call Follow Heuristic Return Follow Heuristic Loop Header Follow Heuristic Store Post Follow Heuristic Dominator not-taken taken New Tree After 1 Iteration
Goal 2: Adding New Heuristics Loop Follow Heuristic Opcode 1. Modify original Ball and Larus Heuristics by... 2. Add additional heuristics one by one and calculate prediction accuracy 3. Permanently include heuristic with highest prediction accuracy 4. Repeat 1-3 with extended set until accuracy no longer improves Follow Heuristic Call Follow Heuristic Return Follow Heuristic Loop Header Follow Heuristic Store Post Follow Heuristic Dominator Follow Heuristic Dep Distance not short short not-taken taken
Goal 2: Adding New Heuristics Loop Follow Heuristic Opcode 1. Modify original Ball and Larus Heuristics by... 2. Add additional heuristics one by one and calculate prediction accuracy 3. Permanently include heuristic with highest prediction accuracy 4. Repeat 1-3 with extended set until accuracy no longer improves Follow Heuristic Call Follow Heuristic Return Follow Heuristic Loop Header Follow Heuristic Store Post Follow Heuristic Dominator ... (for all features ) Follow Heuristic Dep Distance not short short not-taken taken
Goal 2: Adding New Heuristics 1. Modify original Ball and Larus Heuristics by... 2. Add additional heuristics one by one and calculate prediction accuracy 3. Permanently include heuristic with highest prediction accuracy 4. Repeat 1-3 with extended set until accuracy no longer improves Final Tree
Goal 2: Predict Non Post-Dominating Successor Heuristic Definition If a branch has two successors where one post-dominates the current BB, predict the non post-dominating successor as taken
Goal 2: Predict Non Post-Dominating Successor Heuristic Definition If a branch has two successors where one post-dominates the current BB, predict the non post-dominating successor as taken Example int i = 0 if(i < 100){ printf("inside") } printf("outside")
Goal 2: Predict Non Post-Dominating Successor Heuristic Definition If a branch has two successors where one post-dominates the current BB, predict the non post-dominating successor as taken Example BB1 int i = 0 if(i < 100){ printf("inside") } printf("outside") i = 0 BB2 printf("inside") BB3 printf("outside")
Goal 2: Predict Non Post-Dominating Successor Heuristic Definition If a branch has two successors where one post-dominates the current BB, predict the non post-dominating successor as taken Example BB1 int i = 0 if(i < 100){ printf("inside") } printf("outside") i = 0 BB2 printf("inside") BB3 printf("outside")
Goal 2: Distance Dependency Heuristic Definition If the number of instructions between producing a register value and consuming it is >3 or undefined, predict the branch as not-taken.
Goal 2: Distance Dependency Heuristic Definition If the number of instructions between producing a register value and consuming it is >3 or undefined, predict the branch as not-taken. Example int i = 0 int j = 1 if(i < 100){ ... }
Goal 2: Distance Dependency Heuristic Definition If the number of instructions between producing a register value and consuming it is >3 or undefined, predict the branch as not-taken. Example int i = 0 int j = 1 if(i < 100){ ... } operand defining instruction branch
Goal 2: Distance Dependency Heuristic Definition If the number of instructions between producing a register value and consuming it is >3 or undefined, predict the branch as not-taken. Example int i = 0 int j = 1 if(i < 100){ ... } distance = 2
Goal 2: Distance Dependency Heuristic Definition If the number of instructions between producing a register value and consuming it is >3 or undefined, predict the branch as not-taken. Example int i = 0 int j = 1 taken if(i < 100){ ... } distance = 2 predict
Goal 2: Results Predict Non Post-Dominating Successor Replaces Pointer heuristic, increasing coverage by 2% IPM increases from 32.1 34.7 Dependency Distance Non-random prediction of previously unseen branches i.e. 100% coverage IPM further increases from 34.7 37.1 i.e. 18.5% overall
Commentary Strengths 1. 2. High transparency as a machine learning model Automatic generation and optimization of static branch predictors Weaknesses 1. Experimental results are dependent upon the compiler, ISA, and benchmarks
Thank You! Questions?