Standardization Concepts for CubeSat Applications












S
t
a
n
d
a
r
d
i
z
a
t
i
o
n
c
o
n
c
e
p
t
s
f
o
r
C
u
b
e
S
a
t
a
p
p
l
i
c
a
t
i
o
n
s
Tomasz Szewczyk, Kostas Marinis
28/09/2023






A
g
e
n
d
a
•
Why we need standardization on CubeSats?
•
Generic overview of SAVOIR
avionics functions
•
CubeSat Avionics
– how we would like it to be..
•
Mapping of SAVOIR Functionalities into CubeSat architecture
•
Other standardisation/guidelines concepts applicable to CubeSat

W
h
y
s
t
a
n
d
a
r
d
i
z
a
t
i
o
n
?
Reliability figures of CubeSats will increase. CubeSats will fly to Moon (
i.e. LUMIO/VMMO
), Mars (
i.e. Martini
),
Deep Space (
i.e. M-ARGO, HERA CubeSat
)
„Bigger” Satellites have set of ECSS standards that cover all aspects of space project.
For CubeSat, there are tailored ECSS
standards
that provide set
s
of Applicable/Recomm
e
nded requirements.
SAVOIR (Space AVionics Open Interface aRchitecture)
– standardization of avionics
for
„bigger” satellites.
Set of specifications/handbook covering the topics of avionics/OBC/RTU/Mass Memory/FDIR/Busses/…
Some concepts of SAVOIR could be very useful in CubeSat applications.
S
A
V
O
I
R
F
u
n
c
t
i
o
n
a
l
R
e
f
e
r
e
n
c
e
A
r
c
h
i
t
e
c
t
u
r
e
(
F
R
A
)
S
A
V
O
I
R
F
R
A
–
P
l
a
t
f
o
r
m
F
u
n
c
t
i
o
n
s
•
Processing Module (PM)
•
Telecommand (TC)
•
Telemetry (TM)
•
Essential TC
•
Essential TM
•
Security (optional)
•
Reconfiguration (RM)
•
P/F Data Storage (PFDS)
•
On-Board Time (OBT)
•
Time Reference (GNSS)
•
Data Concentrator
•
Sensors & Actuators
•
Sensors & Actuators I/Fs
•
Mission Data Links
•
Cmd & Ctrl Links
P
a
y
l
o
a
d
f
u
n
c
t
i
o
n
s
(
i
n
f
o
r
m
a
t
i
v
e
)
:
•
Payload Data Routing
•
Instruments (Payloads), ICUs, P/L
I/Fs
•
P/L Data Storage (Optional)
•
Payload TM (Optional)
•
Payload Security (Optional)
H
o
t
r
e
d
u
n
d
a
n
c
y
:
B
o
t
h
m
o
d
u
l
e
s
p
o
w
e
r
e
d
-
o
n
a
n
d
a
c
t
i
v
e
W
a
r
m
r
e
d
u
n
d
a
n
c
y
:
R
e
d
u
n
d
a
n
t
m
o
d
u
l
e
c
a
n
b
e
p
o
w
e
r
e
d
-
o
n
,
b
u
t
o
n
s
t
a
n
d
-
b
y
/
i
n
a
c
t
i
v
e
C
o
l
d
r
e
d
u
n
d
a
n
c
y
:
R
e
d
u
n
d
a
n
t
m
o
d
u
l
e
p
o
w
e
r
e
d
-
o
f
f
.
S
A
V
O
I
R
F
R
A
–
M
a
p
p
i
n
g
o
n
H
W
b
l
o
c
k
s
M
a
p
p
i
n
g
o
f
S
A
V
O
I
R
f
u
n
c
t
i
o
n
s
w
i
t
h
i
n
t
y
p
i
c
a
l
h
a
r
d
w
a
r
e
b
u
i
l
d
i
n
g
b
l
o
c
k
s
:
-
O
n
-
B
o
a
r
d
C
o
m
p
u
t
e
r
(
O
B
C
)
(Security and ETM optional)
-
R
e
m
o
t
e
T
e
r
m
i
n
a
l
U
n
i
t
(
R
T
U
)
Limits impact of avionics variability wrt
the OBC I/O interfaces, by concentrating
the many avionics interfaces toward a
single communication bus with the OBC
-
T
i
m
e
R
e
f
e
r
e
n
c
e
(
G
N
S
S
)
Provides PPS, but is also a Position & Velocity
sensor
-
Ground-to-Spacecraft Interfaces
(S-band, X-band, Ka-band transponders)
-
Platform to payload interfaces
High data rate links, and lower data rate
Cmd & Ctrl links
H
o
t
r
e
d
u
n
d
a
n
c
y
:
B
o
t
h
m
o
d
u
l
e
s
p
o
w
e
r
e
d
-
o
n
a
n
d
a
c
t
i
v
e
W
a
r
m
r
e
d
u
n
d
a
n
c
y
:
R
e
d
u
n
d
a
n
t
m
o
d
u
l
e
c
a
n
b
e
p
o
w
e
r
e
d
-
o
n
,
b
u
t
o
n
s
t
a
n
d
-
b
y
/
i
n
a
c
t
i
v
e
C
o
l
d
r
e
d
u
n
d
a
n
c
y
:
R
e
d
u
n
d
a
n
t
m
o
d
u
l
e
p
o
w
e
r
e
d
-
o
f
f
.
D
a
t
a
H
a
n
d
l
i
n
g
S
y
s
t
e
m
i
n
C
u
b
e
s
a
t
s
(
1
/
2
)
On-Board Computer
On-Board Computer
(incl. Mass Memory)
(incl. Mass Memory)
CAN Bus
Communication
Communication
Subsystem
Subsystem
Power
Power
Subsystem
Subsystem
Attitude and Orientation
Attitude and Orientation
Control Subsystem
Control Subsystem
Payload
Payload
#1
#1
Payload
Payload
#2
#2
Payload
Payload
#3
#3
Analog/Digital IO
I2C
I2C
UART
Temperatures on
Solar Panels
Temperatures
Deployment
SPI
Payload Interface Unit
Payload Interface Unit
UART/RS422
Reaction Wheels
Magnetotorquers
Star Tracker
Sun Sensors
RS485, SPI
, …
Analog, PWM
RS422
I
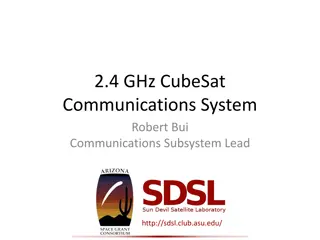
n CubeSats, the Data Handling Subsystem looks similar to this (“
good practice
” example):
•
On-Board Computer (OBC): single PC104 board
•
Platform and Payload Mass Memory: included in OBC board (Flash chip, eMMC, MRAM, SD Card,…)
•
Remote Terminal Unit (RTU) is rather dispersed (temperature/voltage sensors , separation sensors, actuators)
•
Buses and Interfaces: CAN Bus is most commonly used, also I
2
C
•
Payloads with various interfaces to
Payload Interface Unit or
OBC (SPI, I
2
C, UART, RS-422,…)
Following figure illustrates “
good practice
” example for a CubeSat DHS architecture.
(most) SAVOIR functions can be implemented with this architecture, based on common Bus and Communication Protocol.
D
a
t
a
H
a
n
d
l
i
n
g
S
y
s
t
e
m
i
n
C
u
b
e
s
a
t
s
(
2
/
2
)
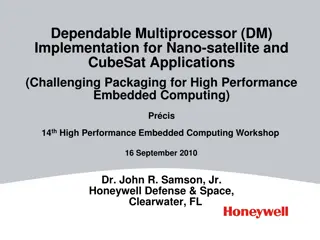
Few points to give
context of SAVOIR in CubeSat world
:
•
Redundancies, and therefore cross-strapping, are not common on CubeSats.
•
CAN Bus across all platform subsystems allows
inter-communication
(everyone can talk to everyone).
•
Common protocol
(i.e.
CSP
– CubeSat Space Protocol) allows access to all sub-systems as it would be on one network.
•
Implementation of
SAVOIR
functions on CubeSat might fall into different subsystems
•
With relatively simple design choices you can implement SAVOIR architecture, or add new level of FDIR
On-Board Computer
On-Board Computer
(incl. Mass Memory)
(incl. Mass Memory)
CAN Bus
Communication
Communication
Subsystem
Subsystem
Power
Power
Subsystem
Subsystem
Attitude and Orientation
Attitude and Orientation
Control Subsystem
Control Subsystem
Payload
Payload
#1
#1
Payload
Payload
#2
#2
Payload
Payload
#3
#3
Analog/Digital IO
I2C
I2C
UART
Temperatures on
Solar Panels
Temperatures
Deployment
SPI
Payload Interface Unit
Payload Interface Unit
UART/RS422
Reaction Wheels
Magnetotorquers
Star Tracker
Sun Sensors
RS485, SPI
, …
Analog, PWM
RS422
D
a
t
a
H
a
n
d
l
i
n
g
S
y
s
t
e
m
i
n
C
u
b
e
s
a
t
s
(
2
/
2
)
Few points to give
context of SAVOIR in CubeSat world
:
•
Redundancies, and therefore cross-strapping, are not common on CubeSats.
•
CAN Bus across all platform subsystems allows
inter-communication
(everyone can talk to everyone).
•
Common protocol
(i.e.
CSP
– CubeSat Space Protocol) allows access to all sub-systems as it would be on one network.
•
Implementation of
SAVOIR
functions on CubeSat might fall into different subsystems
•
With relatively simple design choices you can implement SAVOIR architecture, or add new level of FDIR
On-Board Computer
On-Board Computer
(incl. Mass Memory)
(incl. Mass Memory)
CAN Bus
Communication
Communication
Subsystem
Subsystem
Power
Power
Subsystem
Subsystem
Attitude and Orientation
Attitude and Orientation
Control Subsystem
Control Subsystem
Payload
Payload
#1
#1
Payload
Payload
#2
#2
Payload
Payload
#3
#3
Analog/Digital IO
I2C
I2C
UART
Temperatures on
Solar Panels
Temperatures
Deployment
SPI
Payload Interface Unit
Payload Interface Unit
UART/RS422
Reaction Wheels
Magnetotorquers
Star Tracker
Sun Sensors
RS485, SPI
, …
Analog, PWM
RS422
COMMS subsystem does not only do communication...
Possibly also essential telemetry/telecommand
, update AOCS parameters
D
a
t
a
H
a
n
d
l
i
n
g
S
y
s
t
e
m
i
n
C
u
b
e
s
a
t
s
(
2
/
2
)
Few points to give
context of SAVOIR in CubeSat world
:
•
Redundancies, and therefore cross-strapping, are not common on CubeSats.
•
CAN Bus across all platform subsystems allows
inter-communication
(everyone can talk to everyone).
•
Common protocol
(i.e.
CSP
– CubeSat Space Protocol) allows access to all sub-systems as it would be on one network.
•
Implementation of
SAVOIR
functions on CubeSat might fall into different subsystems
•
With relatively simple design choices you can implement SAVOIR architecture, or add new level of FDIR
On-Board Computer
On-Board Computer
(incl. Mass Memory)
(incl. Mass Memory)
CAN Bus
Communication
Communication
Subsystem
Subsystem
Power
Power
Subsystem
Subsystem
Attitude and Orientation
Attitude and Orientation
Control Subsystem
Control Subsystem
Payload
Payload
#1
#1
Payload
Payload
#2
#2
Payload
Payload
#3
#3
Analog/Digital IO
I2C
I2C
UART
Temperatures on
Solar Panels
Temperatures
Deployment
SPI
Payload Interface Unit
Payload Interface Unit
UART/RS422
Reaction Wheels
Magnetotorquers
Star Tracker
Sun Sensors
RS485, SPI
, …
Analog, PWM
RS422
POWER subsystem does not only do power...
Possibly also Reconfiguration, Watchdog of all subsystems,...
M
a
p
p
i
n
g
o
f
S
A
V
O
I
R
f
u
n
c
t
i
o
n
s
t
o
C
u
b
e
s
a
t
s
Benefits of standardization
•
Streamline the design and development of avionics modules, units and systems
-> i.e. everyone in Europe know the procedures/review/documents etc.
•
Reduce integration and assembly times (shorter “time to flight”)
-> i.e. common standard protocols (i.e. CSP) allow you to interface new subsystems easily
•
Facilitate and possibly even accelerate the verification of hardware
-> i.e. each subsystem can be verified/tested separately
•
Reduce costs and effort for design and verification cycles, also by reuse of design/software
•
Improve quality, via adoption and use of engineering and QA standards
-> you can learn from know-how captured in the standards
•
Increase competition and competitiveness
•
Facilitate cooperation and interoperability
C
o
n
c
e
p
t
s
,
i
d
e
a
s
,
p
r
o
p
o
s
a
l
s
Reliability requirements of future CubeSat (NanoSat) / MicroSat missions may increase.
o
CubeSats will be used for Moon and Mars missions, as companions to other satellites (e.g.
HERA), etc
Consider adopting methods for increasing reliability to meet (future) mission requirements, as
(if/when) needed:
o
FDIR concepts (Fault Detection, Isolation and Recovery), also built on top of SAVIOR
reference architecture
o
Fault tolerance measures
Mitigation of radiation induced SEE: SEUs (memories, FPGAs), SEFI (SDRAM), SEL (CMOS
devices)
Memories: EDAC/ECC (SEC/DED, R-S, CRC), scrubbing
FPGA logic: TMR
Software: Watchdogs, lock-stepping, duplicate-and-compare
Hardware: current monitoring, latchup-up protection;
o
Use of redundancy
Duplication of modules, links
C
o
n
c
e
p
t
s
,
i
d
e
a
s
,
p
r
o
p
o
s
a
l
s
Consider use of ESA COTS guidelines (public release of doc – coming soon!)
Benefit from adopting concepts from SAVOIR and other standardisation initiatives
Consider adoption of (
or at least, consult
) guidelines and requirements from SAVOIR
specifications, ECSS and CCSDS standards, for both engineering (HW, SW) and quality
assurance. Indicatively:
o
ECSS-E-ST-10-03C Rev.1 – Testing
o
ECSS-Q-ST-70-12C – PCB Design
o
ECSS-E-ST-10-06C – Technical requirements specification
o
ECSS-Q-HB-60-02A – Techniques for radiation effects mitigation in ASICs and FPGAs
handbook
o
ECSS-Q-ST-60-13C Rev.1 – Commercial electrical, electronic and electromechanical (EEE)
components
Standardisation of communication protocols
o
Preference for CAN bus + CubeSat Space Protocol (CSP)
CubeSat Engineering Guidelines (coming soon)
R
e
f
e
r
e
n
c
e
s
•
ECSS:
https://ecss.nl/
•
CCSDS:
https://public.ccsds.org/default.aspx
•
More on SAVOIR Functions & OBC: EDHPC
2023
Presentation
„
ADHA On-board Computer (OBC) Module
”
•
SAVOIR:
https://savoir.estec.esa.int/
or
https://essr.esa.int/
•
CubeSat Enginnering Guidelines:
ESA-TECSPC-MAN-2023-002445
(Coming Soon)
•
ESA COTS Guidelienes – Coming Soon
T
h
a
n
k
y
o
u
!
Tomasz.
S
zewczyk@esa.int
Kostas.Marinis@esa.int
Understanding the importance of standardization in CubeSat applications, this document discusses the need for reliability and the adoption of SAVOIR standardization for avionics. It covers the mapping of SAVOIR functionalities into CubeSat architecture and explores how standardized practices can enhance the performance and deployment of CubeSats. The SAVOIR Functional Reference Architecture is also highlighted, showcasing key elements such as system alarms, platform functions, telemetry, and more.

Download Presentation

Please find below an Image/Link to download the presentation.
The content on the website is provided AS IS for your information and personal use only. It may not be sold, licensed, or shared on other websites without obtaining consent from the author.If you encounter any issues during the download, it is possible that the publisher has removed the file from their server.
You are allowed to download the files provided on this website for personal or commercial use, subject to the condition that they are used lawfully. All files are the property of their respective owners.
The content on the website is provided AS IS for your information and personal use only. It may not be sold, licensed, or shared on other websites without obtaining consent from the author.
E N D
Presentation Transcript
Standardization concepts for CubeSat applications Tomasz Szewczyk, Kostas Marinis 28/09/2023 1 ESA UNCLASSIFIED For ESA Official Use Only
Agenda Why we need standardization on CubeSats? Generic overview of SAVOIR avionics functions CubeSat Avionics how we would like it to be.. Mapping of SAVOIR Functionalities into CubeSat architecture Other standardisation/guidelines concepts applicable to CubeSat 2
Why standardization? Reliability figures of CubeSats will increase. CubeSats will fly to Moon (i.e. LUMIO/VMMO), Mars (i.e. Martini), Deep Space (i.e. M-ARGO, HERA CubeSat) Bigger Satellites have set of ECSS standards that cover all aspects of space project. For CubeSat, there are tailored ECSS standards that provide sets of Applicable/Recommended requirements. SAVOIR (Space AVionics Open Interface aRchitecture) standardization of avionics for bigger satellites. Set of specifications/handbook covering the topics of avionics/OBC/RTU/Mass Memory/FDIR/Busses/ Some concepts of SAVOIR could be very useful in CubeSat applications. 3
SAVOIR Functional Reference Architecture (FRA) System alarms SAVOIR FRA Platform Functions Processing Module (PM) Telecommand (TC) Telemetry (TM) Essential TC Essential TM Security (optional) Reconfiguration (RM) P/F Data Storage (PFDS) On-Board Time (OBT) Time Reference (GNSS) Data Concentrator Sensors & Actuators Sensors & Actuators I/Fs Mission Data Links Cmd & Ctrl Links RM log Platform Payload Enable/Disable CPDU commands TC Safe-Guard Memory Essential TC Platform commanding Segments Reconfiguration Payload commanding TC Segments TC Segments CPDU commands Alarms Payload Data Routing Mission Data Links Context data, Boot report TC Telecommand CLTUs Processing TC Segments TM packets Instruments incl. ICUs, Payload I/F Unit X PIO Authentication/ Decryption Inter -PM Time and time tick TM packets, files Payload direct monitoring Payload Data Storage Data Platform sensors and actuators CLCW Concentrator Security Platform Data Storage Sensor and actuator I/F Payload Telemetry TM Payload functions (informative): Payload Data Routing Instruments (Payloads), ICUs, P/L I/Fs P/L Data Storage (Optional) Payload TM (Optional) Payload Security (Optional) packets Encryption TM Sensor and actuator I/F CADUs Encryption Platform Telemetry On-Board Time TM TM frame sync Trig CADUs Payload control Security Platform synchronisation X Time & Tick Payload synchronisation Time tick Status TM Synchronisation packets Hot redundant operation Hot redundancy : Both modules powered-on and active Warm redundancy : Redundant module can be powered-on, but on stand-by/ inactive Coldredundancy: Redundant module powered-off. Essential TM Time reference Cmd & Ctrl Links Warm redundant operation PIO Discrete signals Warm or cold redundant operation Time Cold redundant operation 4
SAVOIR FRA Mapping on HW blocks OBC RM log interface Ground to Spacecraft Mapping of SAVOIR functions within typical hardware building blocks: Platform Payload Enable/Disable CPDU commands TC Safe-Guard Memory Essential TC Platform commanding Segments Reconfiguration - On-Board Computer (OBC) (Security and ETM optional) Payload commanding TC Platform to payload interface Segments TC Segments CPDU commands Alarms - Remote Terminal Unit (RTU) Limits impact of avionics variability wrt the OBC I/O interfaces, by concentrating the many avionics interfaces toward a single communication bus with the OBC Payload Data Routing Mission Data Links Context data, Boot report TC Telecommand CLTUs Processing TC Segments TM packets Instruments incl. ICUs, Payload I/F Unit RTU X PIO Authentication/ Decryption Inter -PM Time and time tick TM packets, files Payload direct monitoring - Time Reference (GNSS) Provides PPS, but is also a Position & Velocity sensor Payload Data Storage Data Platform sensors and actuators CLCW Concentrator Security Platform Data Storage Sensor and actuator I/F - Ground-to-Spacecraft Interfaces (S-band, X-band, Ka-band transponders) CADUs Payload Telemetry TM packets Encryption TM Sensor and actuator I/F - Platform to payload interfaces High data rate links, and lower data rate Cmd & Ctrl links Encryption Platform Telemetry On-Board Time TM TM frame sync Trig CADUs Payload control Security Platform synchronisation X Time & Tick Payload synchronisation Time tick Status TM Synchronisation packets Hot redundant operation Hot redundancy : Both modules powered-on and active Warm redundancy : Redundant module can be powered-on, but on stand-by/ inactive Coldredundancy: Redundant module powered-off. Essential TM Time reference Cmd & Ctrl Links Warm redundant operation PIO Discrete signals Warm or cold redundant operation Time Cold redundant operation 5
Data Handling System in Cubesats (1/2) In CubeSats, the Data Handling Subsystem looks similar to this ( good practice example): On-Board Computer (OBC): single PC104 board Platform and Payload Mass Memory: included in OBC board (Flash chip, eMMC, MRAM, SD Card, ) Remote Terminal Unit (RTU) is rather dispersed (temperature/voltage sensors , separation sensors, actuators) Buses and Interfaces: CAN Bus is most commonly used, also I2C Payloads with various interfaces to Payload Interface Unit or OBC (SPI, I2C, UART, RS-422, ) Following figure illustrates good practice example for a CubeSat DHS architecture. (most) SAVOIR functions can be implemented with this architecture, based on common Bus and Communication Protocol. Payload #2 Payload #1 Payload #3 SPI I2C UART RS422 Reaction Wheels Magnetotorquers Star Tracker Sun Sensors Payload Interface Unit RS485, SPI, Analog, PWM UART/RS422 Temperatures on Solar Panels Temperatures On-Board Computer (incl. Mass Memory) Deployment Analog/Digital IO I2C CAN Bus 6
Data Handling System in Cubesats (2/2) Few points to give context of SAVOIR in CubeSat world: Redundancies, and therefore cross-strapping, are not common on CubeSats. CAN Bus across all platform subsystems allows inter-communication (everyone can talk to everyone). Common protocol (i.e. CSP CubeSat Space Protocol) allows access to all sub-systems as it would be on one network. Implementation of SAVOIR functions on CubeSat might fall into different subsystems With relatively simple design choices you can implement SAVOIR architecture, or add new level of FDIR Payload #2 Payload #1 Payload #3 SPI I2C UART RS422 Reaction Wheels Magnetotorquers Star Tracker Sun Sensors Payload Interface Unit RS485, SPI, Analog, PWM UART/RS422 Temperatures on Solar Panels Temperatures On-Board Computer (incl. Mass Memory) Deployment Analog/Digital IO I2C CAN Bus 7
Data Handling System in Cubesats (2/2) Few points to give context of SAVOIR in CubeSat world: Redundancies, and therefore cross-strapping, are not common on CubeSats. CAN Bus across all platform subsystems allows inter-communication (everyone can talk to everyone). Common protocol (i.e. CSP CubeSat Space Protocol) allows access to all sub-systems as it would be on one network. Implementation of SAVOIR functions on CubeSat might fall into different subsystems With relatively simple design choices you can implement SAVOIR architecture, or add new level of FDIR Payload #2 Payload #1 Payload #3 COMMS subsystem does not only do communication... Possibly also essential telemetry/telecommand, update AOCS parameters SPI I2C UART RS422 Reaction Wheels Magnetotorquers Star Tracker Sun Sensors Payload Interface Unit RS485, SPI, Analog, PWM UART/RS422 Temperatures on Solar Panels Temperatures On-Board Computer (incl. Mass Memory) Deployment Analog/Digital IO I2C CAN Bus 8
Data Handling System in Cubesats (2/2) Few points to give context of SAVOIR in CubeSat world: Redundancies, and therefore cross-strapping, are not common on CubeSats. CAN Bus across all platform subsystems allows inter-communication (everyone can talk to everyone). Common protocol (i.e. CSP CubeSat Space Protocol) allows access to all sub-systems as it would be on one network. Implementation of SAVOIR functions on CubeSat might fall into different subsystems With relatively simple design choices you can implement SAVOIR architecture, or add new level of FDIR Payload #2 Payload #1 Payload #3 POWER subsystem does not only do power... Possibly also Reconfiguration, Watchdog of all subsystems,... SPI I2C UART RS422 Reaction Wheels Magnetotorquers Star Tracker Sun Sensors Payload Interface Unit RS485, SPI, Analog, PWM UART/RS422 Temperatures on Solar Panels Temperatures On-Board Computer (incl. Mass Memory) Deployment Analog/Digital IO I2C CAN Bus 9
Mapping of SAVOIR functions to Cubesats System alarms CubeSat SAVOIR RM log Platform Payload Enable/Disable Processing Platform Data Storage Payload Data Storage On-board Time Mission Data Links Cmd & Ctrl Links (Optional) Payload processing Parallel I/O o o o o o o o o CPDU commands TC Safe-Guard Memory Essential TC Platform commanding Segments Reconfiguration Payload commanding OBC/Processing Module TC Segments TC Segments CPDU commands Alarms Payload Data Routing Mission Data Links Context data, Boot report TC Telecommand Telecommand Platform Telemetry Essential TC/Essential TM (by direct CAN connection to modules) Security (optional, for TC authentication/decryption) o o o CLTUs Processing TC Segments TM packets Instruments incl. ICUs, Payload I/F Unit COMMS X PIO Authentication/ Decryption Inter -PM Time and time tick o TM packets, files Payload direct monitoring Payload Data Storage Data Power Conditioning and Distribution Module (PCDM) Power control & distribution Reconfiguration (limited. Can power cycle modules via CAN bus) Parallel I/O (if MCU present) o o Platform sensors and actuators CLCW Concentrator Security Platform Data Storage Sensor and actuator I/F o Payload Telemetry TM packets Time reference Position and velocity sensor AOCS sensors and actuators Encryption o o o TM Sensor and actuator I/F AOCS CADUs Incl. GPS module Encryption Platform Telemetry On-Board Time TM TM frame sync Trig Payload TM (optional) CADUs Payload Telemetry Payload control Security - Payload Security Platform synchronisation X Time & Tick (Distributed function) Data Concentrator (RTU) Payload synchronisation Time tick Status TM Synchronisation packets - Sensor & actuator I/F Hot redundant operation Essential TM Time reference Cmd & Ctrl Links Warm redundant operation (Partial, in PIO Discrete signals Reconfiguration Warm or cold redundant operation COMMS and PCDM) Time Cold redundant operation - Safe Guard Memory 10
Benefits of standardization Streamline the design and development of avionics modules, units and systems -> i.e. everyone in Europe know the procedures/review/documents etc. Reduce integration and assembly times (shorter time to flight ) -> i.e. common standard protocols (i.e. CSP) allow you to interface new subsystems easily Facilitate and possibly even accelerate the verification of hardware -> i.e. each subsystem can be verified/tested separately Reduce costs and effort for design and verification cycles, also by reuse of design/software Improve quality, via adoption and use of engineering and QA standards -> you can learn from know-how captured in the standards Increase competition and competitiveness Facilitate cooperation and interoperability 11
Concepts, ideas, proposals Reliability requirements of future CubeSat (NanoSat) / MicroSat missions may increase. CubeSats will be used for Moon and Mars missions, as companions to other satellites (e.g. HERA), etc o Consider adopting methods for increasing reliability to meet (future) mission requirements, as (if/when) needed: FDIR concepts (Fault Detection, Isolation and Recovery), also built on top of SAVIOR reference architecture Fault tolerance measures Mitigation of radiation induced SEE: SEUs (memories, FPGAs), SEFI (SDRAM), SEL (CMOS devices) Memories: EDAC/ECC (SEC/DED, R-S, CRC), scrubbing FPGA logic: TMR Software: Watchdogs, lock-stepping, duplicate-and-compare Hardware: current monitoring, latchup-up protection; Use of redundancy Duplication of modules, links o o o 12
Concepts, ideas, proposals Consider use of ESA COTS guidelines (public release of doc coming soon!) Benefit from adopting concepts from SAVOIR and other standardisation initiatives Consider adoption of (or at least, consult) guidelines and requirements from SAVOIR specifications, ECSS and CCSDS standards, for both engineering (HW, SW) and quality assurance. Indicatively: o ECSS-E-ST-10-03C Rev.1 Testing o ECSS-Q-ST-70-12C PCB Design o ECSS-E-ST-10-06C Technical requirements specification o ECSS-Q-HB-60-02A Techniques for radiation effects mitigation in ASICs and FPGAs handbook o ECSS-Q-ST-60-13C Rev.1 Commercial electrical, electronic and electromechanical (EEE) components Standardisation of communication protocols o Preference for CAN bus + CubeSat Space Protocol (CSP) CubeSat Engineering Guidelines (coming soon) 13
References ECSS: https://ecss.nl/ CCSDS: https://public.ccsds.org/default.aspx More on SAVOIR Functions & OBC: EDHPC 2023 Presentation ADHA On-board Computer (OBC) Module SAVOIR: https://savoir.estec.esa.int/ or https://essr.esa.int/ CubeSat Enginnering Guidelines: ESA-TECSPC-MAN-2023-002445 (Coming Soon) ESA COTS Guidelienes Coming Soon 14
Thank you! Tomasz.Szewczyk@esa.int Kostas.Marinis@esa.int 15



")

")
")
")
")