Efficient Dynamic Skinning with Low-Rank Helper Bone Controllers

Efficient Dynamic Skinning with
Low-Rank Helper Bone Controllers
Tomohiko Mukai
,
Tokai University
Shigeru Kuriyama
,
Toyohashi University
of Technology
1

Motivation
2
Wish List from Game Developers
•
Robustness
•
Simplicity
–
Compatibility with existing workflow
•
Performance
–
Fast & Predictable execution time
–
Small memory footprint
•
Quality
–
Physically-valid natural skin deformation
3
[Hecker 2011]
–
P
l
a
u
s
i
b
l
e
d
y
n
a
m
i
c
d
e
f
o
r
m
a
t
i
o
n
×
Details (e.g. wrinkles)
×
External forces (e.g. gravity)
×
Physical validity
Linear Blend Skinning (LBS)
•
Robust
•
Simple
–
Supported by most engines
–
Established tools
•
High performance
–
Efficient & Predictable
•
Dynamic deformation
4
[Thalmann 1988]
Helper Bone Rig
5
[Mohr 2003, Parks 2005, Kim 2011]
Procedural control
on CPU
(
e.g. driven-key/expression in Maya
)
Primary bone
Helper bone
LBS
on GPU
Example-based Helper Bone Control
6
・
State-space model
・
System identification
・
Nuclear norm optimization
Skin weights
& Helper bone
transformation
Example skin
& skeleton
animation
Helper Bone Controller
7
SSM of LTI
Polynomial function
[Mukai 2015]
Related Dynamic Skinning Methods
8
Dyna [Pons-Moll 2015]
DMPL [Loper 2015]
Position-based dynamics
[Rumann 2015]
Skeleton-driven elastic
simulation [Park 2006]
Pose-space subspace
dynamics
[Xu 2016]
Kinodynamic skinning
[Angelidis 2007]
Elastic material param-
eter learning [Shi 2008]
B
u
i
l
d
i
n
g
H
e
l
p
e
r
B
o
n
e
C
o
n
t
r
o
l
l
e
r
9
•
Input
–
Example skeleton animation
–
Example shape animation
–
Number of helper bones
•
Output
–
Helper bone controller
–
Skinning weight
•
Approximation criterion
–
Squared reconstruction error of vertex position
Authoring System
10
・
・
・
Example-based Controller Building
- Static controller
(muscle bulging)
-
Dynamic controller
(jiggling)
11
Skinning decomposition
[Mukai 2015, Le 2012]
&
[Mukai 2015]
Skin weights
& Helper bone
transformation
Example skin
& skeleton
animation
Dynamic Control with LTI System
12
Linear Time-
Invariant system
(
unknown
)
Output
(helper bone motion)
Input
(skeleton motion)
Internal state
(
unknown
)
e.g. kinetic energy, inertia force
State-Space Model of LTI System
13
Helper bone
motion
Internal state
at next time step
Internal state
Skeleton motion
System
matrix
System Identification
14
Hankel matrix of
helper bone motion
Null-space projection of
Hankel matrix of skeleton
motion
Truncated
singular value
decomposition
Internal state
&
System matrix
Cancel the linear effect of
skeleton motion
from
helper bone motion
Dimensionality Reduction of Internal State
15
: Nuclear norm
N2SID: N
uclear
N
orm
S
ystem
ID
entification
•
Relaxing rank reduction problem into nuclear
norm minimization problem
•
User-specified precision of helper bone control
16
Example helper
bone motion
Helper bone motion
minimizing nuclear norm
[Liu 2013]
Algorithm Summary
17
SSM
+
N2SID
Polynomial function
[Mukai 2015]
E
x
p
e
r
i
m
e
n
t
a
l
R
e
s
u
l
t
s
18
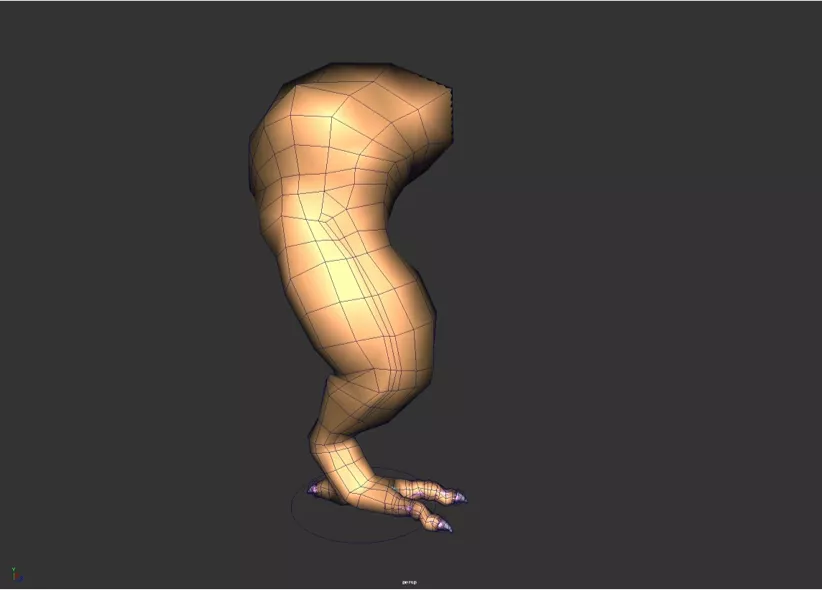
Monster’s Leg Model
•
Maya muscle
•
Height
= 200 cm
•
# of vertices
= 663
•
# of muscles
=
11
•
Joint DOF
= 5
•
Training sequence of
4,000 frames
19
Sampling of Training Data
20
Spline interpolation
Freeze interpolation
Runtime Rig with
Four Helper Bones
21
Performance Evaluation
22
Autoregressive Model-based Control
23
[de Aguiar 2010, Pons-Moll 2015, Loper 2015]
Approximation of Human-like Muscle Rig
http://www.behind-universe.org/
24
Exaggeration of Dynamic Deformation
25
x 0.5
x 1.0
x 2.0
x 4.0
x 6.0
Level of Deformation Details
26
Dynamic
+ Static
(
~20 μs
)
Static only
(~5 μs)
No control
Level of Deformation Details
27
Pros and Cons
Pros
○
Plausible dynamic skinning
○
Simple implementation of state-space model
○
Efficient computation via nuclear norm optimization
Cons
×
Detailed deformation (e.g. wrinkles)
×
External force (gravity, contact, self-collision)
×
Physical validity (volume preservation)
28
Conclusion
•
Helper bone rig
–
Fully compatible with standard workflow
•
State-space model
–
Simple and Robust
(
via Eigen analysis
)
•
Nuclear norm optimization
–
Efficient computation
(
~20 μs
)
–
Small memory
footprint (~10 kB)
•
Future work
–
Locally-adaptive rigging
–
Non-linear skinning models
29
A
c
k
n
o
w
l
e
d
g
e
m
e
n
t
s
SIGGRAPH reviewers
TAISO, Renpoo
(www.behind-universe.org/)
JSPS-KAKENHI
15K16110, 15H02704
This research explores efficient dynamic skinning methods using low-rank helper bone controllers to achieve robust, simple, and high-performance skin deformation in computer graphics. By investigating linear blend skinning techniques and helper bone rigs, the study aims to address the wishlist of game developers for fast, predictable execution times, small memory footprint, and physically-valid skin deformation. Additionally, it delves into example-based bone control, polynomial functions for controller design, and related dynamic skinning approaches like skeleton-driven elastic simulation and position-based dynamics.

Download Presentation

Please find below an Image/Link to download the presentation.
The content on the website is provided AS IS for your information and personal use only. It may not be sold, licensed, or shared on other websites without obtaining consent from the author. Download presentation by click this link. If you encounter any issues during the download, it is possible that the publisher has removed the file from their server.
E N D
Presentation Transcript
Efficient Dynamic Skinning with Low-Rank Helper Bone Controllers Tomohiko Mukai, Tokai University Shigeru Kuriyama, Toyohashi University of Technology 1
Wish List from Game Developers [Hecker 2011] Robustness Simplicity Compatibility with existing workflow Performance Fast & Predictable execution time Small memory footprint Quality Physically-valid natural skin deformation Plausible dynamic deformation Details (e.g. wrinkles) External forces (e.g. gravity) Physical validity 3
Linear Blend Skinning (LBS) [Thalmann 1988] Robust Simple Supported by most engines Established tools High performance Efficient & Predictable Dynamic deformation 4
Helper Bone Rig [Mohr 2003, Parks 2005, Kim 2011] Primary bone Helper bone LBS on GPU Procedural control on CPU e.g. driven-key/expression in Maya 5
Example-based Helper Bone Control Example skin & skeleton animation Skin weights & Helper bone transformation State-space model System identification Nuclear norm optimization 6
Helper Bone Controller Polynomial function [Mukai 2015] SSM of LTI 7
Related Dynamic Skinning Methods Skeleton-driven elastic simulation [Park 2006] Kinodynamic skinning [Angelidis 2007] Dyna [Pons-Moll 2015] DMPL [Loper 2015] Elastic material param- eter learning [Shi 2008] Position-based dynamics [Rumann 2015] Pose-space subspace dynamics [Xu 2016] 8
Authoring System Input Example skeleton animation Example shape animation Number of helper bones Output Helper bone controller Skinning weight Approximation criterion Squared reconstruction error of vertex position 10
Example-based Controller Building Skinning decomposition [Mukai 2015, Le 2012] Example skin & skeleton animation Skin weights & Helper bone transformation - Static controller (muscle bulging) & [Mukai 2015] - Dynamic controller (jiggling) 11
Dynamic Control with LTI System Internal state unknown e.g. kinetic energy, inertia force Linear Time- Invariant system unknown Input (skeleton motion) Output (helper bone motion) 12
State-Space Model of LTI System LTI Internal state at next time step Internal state ??+1 ?? ?? ?? Skeleton motion =? ? ? ? System matrix Helper bone motion 13
System Identification ??+1 ?? ?? ?? =? ? ? ? Cancel the linear effect of skeleton motion from helper bone motion TSVD Null-space projection of Hankel matrix of skeleton motion decomposition ? ? = ? ? ? ? Internal state & System matrix Hankel matrix of helper bone motion Truncated singular value 14
Dimensionality Reduction of Internal State min dim ? = ~ ??+1 ?? ?? ?? =? ? ? ? min rank ? ? TSVD ? ? ? min ? ?N N : Nuclear norm 15
N2SID: NuclearNormSystemIDentification [Liu 2013] Example helper bone motion 2 min ? ? ? ?? ?? 2 + ? N N Helper bone motion minimizing nuclear norm ? Relaxing rank reduction problem into nuclear norm minimization problem User-specified precision of helper bone control 16
Algorithm Summary Polynomial function [Mukai 2015] SSM + N2SID 17
Monsters Leg Model Maya muscle Height # of vertices = 663 # of muscles = 11 Joint DOF = 5 = 200 cm Training sequence of 4,000 frames 19
Sampling of Training Data Freeze interpolation Spline interpolation 20
Performance Evaluation RMSE (cm) Execution time ( s/frame) avg. dim(z) Data size (kB) Method N4SID (w/o NNO) N2SID ? = 105 N2SID ? = 103 N2SID ? = 10 3.07 22.5 9.17 51.0 2.50 19.3 3.21 7.3 2.48 19.2 3.00 7.1 2.49 20.4 4.04 9.0 2 min ?+??+ ? ?? ?? 2 22 ?
Autoregressive Model-based Control [de Aguiar 2010, Pons-Moll 2015, Loper 2015] 23
Approximation of Human-like Muscle Rig http://www.behind-universe.org/ 24
Exaggeration of Dynamic Deformation ??+1 ?? ?? ?? =? ? ? ? x 0.5 x 1.0 x 2.0 x 4.0 x 6.0 25
Level of Deformation Details Dynamic + Static ~20 s Static only (~5 s) No control 26
Pros and Cons Pros Plausible dynamic skinning Simple implementation of state-space model Efficient computation via nuclear norm optimization Cons Detailed deformation (e.g. wrinkles) External force (gravity, contact, self-collision) Physical validity (volume preservation) 28
Conclusion Helper bone rig Fully compatible with standard workflow State-space model Simple and Robust via Eigen analysis Nuclear norm optimization Efficient computation ~20 s Small memory footprint (~10 kB) Acknowledgements SIGGRAPH reviewers TAISO, Renpoo (www.behind-universe.org/) JSPS-KAKENHI 15K16110, 15H02704 Future work Locally-adaptive rigging Non-linear skinning models 29


")