Effective Strategies for Handling Difficult Clients

Speed:
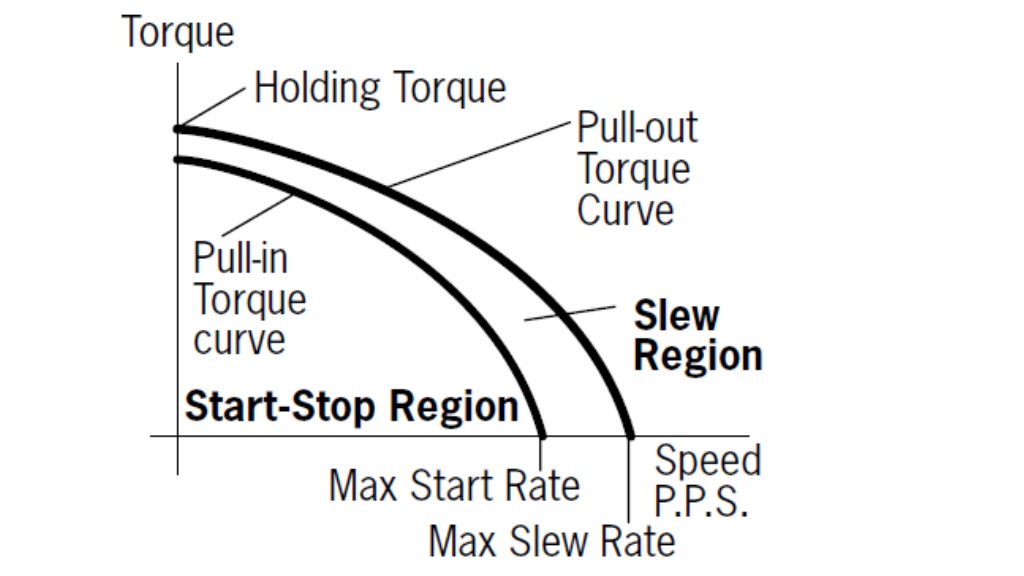
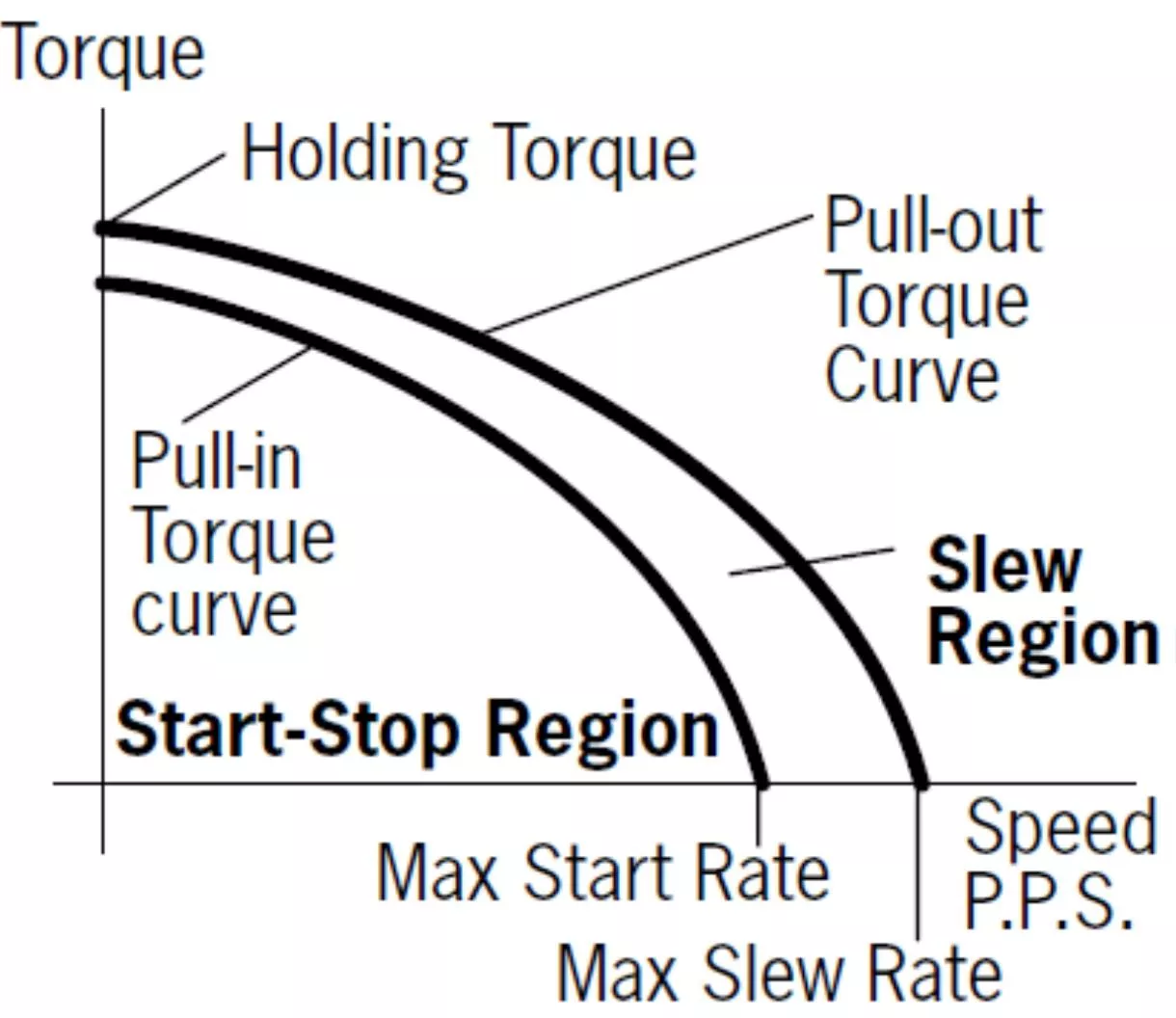
The horizontal axis shows the shaft speed of the motor and in what units
(e.g. rpm, pps, Hz, etc.).
Maximum No-load starting speed:
The maximum no-load starting speed is the
maximum speed at which the motor can be started in synchronism with no load
attached and no acceleration used. It is usually shown as a tick mark labeled “fs”
on the horizontal axis.
Holding Torque:
This is the torque that the motor will produce when the motor
is at rest and rated current is applied to the windings.
Pull-out Torque curve:
This curve represents the maximum torque that the
stepper motor can supply to a load at any given speed. Any torque or speed
required that exceeds (goes above) this curve will cause the motor to lose
synchronism.
Pull-in Torque curve (no load):
This curve represents the maximum torque
and speed combination that an unloaded stepper motor can start or stop without
any acceleration or deceleration. Since the pull-in torque curve for a stepper
motor varies depends on the inertial load attached to the motor, the pull-in
torque curves are not shown in the speed – torque curves shown in catalogs. In
order to operate above the pull-in torque curve, the motor must be accelerated
into or decelerated out of the slew range.
Pull-in Torque curve (inertial load):
This curve represents the maximum
torque and speed combination that a stepper motor with an inertial load (i.e.
damper) can supply to a load and start or stop without any acceleration or
deceleration. In order to operate above the pull-in torque curve, the motor must
be accelerated into or decelerated out of the slew range.
Stepper Motor Advantages:
1.
The rotation angle of the motor is proportional to the input pulse.
2.
The motor has full torque at stand still (if the winding were energized).
3.
Precise positioning and repeatability of movement since good stepper motors
have an accuracy of 3-5% of a step and this error is non accumulative from
one step to the next.
4.
Excellent response to starting/ stopping/ reversing.
5.
Very reliable since there are no contact brushes in the motor. Therefore the life
of the motor is simply dependent on the life of its bearing.
6.
The motors response to digital input pulses provides open-loop control,
making the motor simpler and lest costly to control.
7.
It is possible to achieve very low speed synchronous rotation with the load
that is directly coupled to the shaft.
8.
Wide range of proportional speeds can be realized as the speed is proportional
to the frequency of input pulses.
Stepper Motor Disadvantages:
1.
Resonance can occur if not properly controlled.
2.
Not easy to operate at extremely high speeds.
Learn behavioral patterns, responses, and counter-strategies to facilitate change with challenging clients in social services. Gain insights on skill development and realistic expectations in professional training.

Download Presentation

Please find below an Image/Link to download the presentation.
The content on the website is provided AS IS for your information and personal use only. It may not be sold, licensed, or shared on other websites without obtaining consent from the author.If you encounter any issues during the download, it is possible that the publisher has removed the file from their server.
You are allowed to download the files provided on this website for personal or commercial use, subject to the condition that they are used lawfully. All files are the property of their respective owners.
The content on the website is provided AS IS for your information and personal use only. It may not be sold, licensed, or shared on other websites without obtaining consent from the author.
E N D
Presentation Transcript
Speed: The horizontal axis shows the shaft speed of the motor and in what units (e.g. rpm, pps, Hz, etc.). Maximum No-load starting speed: The maximum no-load starting speed is the maximum speed at which the motor can be started in synchronism with no load attached and no acceleration used. It is usually shown as a tick mark labeled fs on the horizontal axis. Holding Torque: This is the torque that the motor will produce when the motor is at rest and rated current is applied to the windings. Pull-out Torque curve: This curve represents the maximum torque that the stepper motor can supply to a load at any given speed. Any torque or speed required that exceeds (goes above) this curve will cause the motor to lose synchronism.
Pull-in Torque curve (no load): This curve represents the maximum torque and speed combination that an unloaded stepper motor can start or stop without any acceleration or deceleration. Since the pull-in torque curve for a stepper motor varies depends on the inertial load attached to the motor, the pull-in torque curves are not shown in the speed torque curves shown in catalogs. In order to operate above the pull-in torque curve, the motor must be accelerated into or decelerated out of the slew range. Pull-in Torque curve (inertial load): This curve represents the maximum torque and speed combination that a stepper motor with an inertial load (i.e. damper) can supply to a load and start or stop without any acceleration or deceleration. In order to operate above the pull-in torque curve, the motor must be accelerated into or decelerated out of the slew range.
Stepper Motor Advantages: 1. The rotation angle of the motor is proportional to the input pulse. 2. The motor has full torque at stand still (if the winding were energized). 3. Precise positioning and repeatability of movement since good stepper motors have an accuracy of 3-5% of a step and this error is non accumulative from one step to the next. 4. Excellent response to starting/ stopping/ reversing. 5. Very reliable since there are no contact brushes in the motor. Therefore the life of the motor is simply dependent on the life of its bearing. 6. The motors response to digital input pulses provides open-loop control, making the motor simpler and lest costly to control. 7. It is possible to achieve very low speed synchronous rotation with the load that is directly coupled to the shaft. 8. Wide range of proportional speeds can be realized as the speed is proportional to the frequency of input pulses.
Stepper Motor Disadvantages: 1. Resonance can occur if not properly controlled. 2. Not easy to operate at extremely high speeds.

: This curve represents the")