Double Pendulum
Double Pendulum
– A Simple Analysis of a Dynamic System
Presenters:
Brian Okimoto
Yifan Shen
Jonah Taylor
Introduction
•
Euler Lagrange System
•
Hamiltonian System
•
Linearization and Equilibrium Points
•
Modeling the Trajectory
•
Chaos
•
Visualization of This 4-D Dynamic System
Deriving equations of motion: Da math
Deriving Equations of motion: Lagrangian
Deriving equations of motion: Da math part 2
Deriving equations of motion: Da math part 3
Hamiltonian System
Hamiltonian System Part 2
Rewrite into First Order System
Linearization
•
Equilibrium Points {ø1, ø2, ø’1, ø’2}•
(0,0,0,0) Stable
•
(Pi,0,0,0) Unstable
•
(0,Pi,0,0) Unstable
•
(Pi,Pi,0,0) Unstable
(0,0,0,0)
Imaginary Eigenvalues in 4D space.
(Pi,0,0,0),(0,Pi,0,0),(Pi,Pi,0,0)
Same Jacobian and Eigenvalues
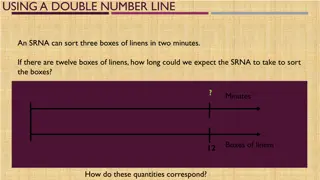
Parametric Plot
•
Pendulum Lengths (l1 =
5, l2 = 10)
•
Gravity (9.81)
•
Donut Effect
•
https://www.youtube.c
om/watch?v=QXf95_EK
S6E
Chaos
•
Sensitivity to the initial conditions
•
Dense Orbit
•
Topological mixing
Sensitivity of the Initial Conditions
•
Small change in initial conditions will result in a great change in long-
term.
θ
1 = 0
θ
1 = 0.00000000000001
θ
1 = 0.0000000000000000001
θ
1 = 0.0000000000000000005
Sensitivity of the Initial Conditions
•
Lyapunov Exponents
•
Sensitivity
•
classify the type of attractor
Dense Orbit
•
Basically, solutions that are arbitrarily close will eventually behave
very differently
Topological Mixing
•
Basically, solutions that are arbitrarily far will eventually come
together – Strange
Attractor
•
4-D System, 4-D Object
•
3-D “cross-sectionals”
The presentation delves into the intricate dynamics of a double pendulum system, covering topics such as the Euler-Lagrange and Hamiltonian systems, linearization, equilibrium points, chaos visualization, and more. Equations of motion are derived through rigorous mathematical analysis, providing insight into the behavior of this complex 4-D system. The exploration extends to solving coupled, non-linear differential equations and understanding the conservation of energy through the Hamiltonian function.

Uploaded on Feb 27, 2025 | 0 Views
Download Presentation

Please find below an Image/Link to download the presentation.
The content on the website is provided AS IS for your information and personal use only. It may not be sold, licensed, or shared on other websites without obtaining consent from the author.If you encounter any issues during the download, it is possible that the publisher has removed the file from their server.
You are allowed to download the files provided on this website for personal or commercial use, subject to the condition that they are used lawfully. All files are the property of their respective owners.
The content on the website is provided AS IS for your information and personal use only. It may not be sold, licensed, or shared on other websites without obtaining consent from the author.
E N D
Presentation Transcript
Double Pendulum A Simple Analysis of a Dynamic System Presenters: Brian Okimoto Yifan Shen Jonah Taylor
Introduction Euler Lagrange System Hamiltonian System Linearization and Equilibrium Points Modeling the Trajectory Chaos Visualization of This 4-D Dynamic System
Deriving equations of motion: Da math Choose 1and 2as coordinates ?1 = ?1sin( 1) ?1= ?1cos( 1) ?2= ?1sin 1 + ?2sin( 2) ?2= ?1cos 1 ?2cos( 2)
Deriving Equations of motion: Lagrangian Lagrangian, L = T U ?2??? ?????? ???????? ? = ?1 Euler-Lagrange equation: ? ?? ?? ?= ?? ??? ?? Takes Lagrangian function as input and outputs the equations of motion of our coordinates for which action is minimized
Deriving equations of motion: Da math part 2 T=1 U=?1??1+ ?2??2 Using our values from before and simplifying we get T=1 2(?1 +?2)?1 ? = ?1+ ?2??1cos 1 ?2??2cos( 2). L=1 2(?1 +?2)?1 ) ?2??1cos 1 + ?2??2cos( 2) 2) + 1 2+ ?1 2+ ?2 2) 2?1(?1 2?2(?2 2+1 2 1 2 2 2+ ?2?1?2 1 2 cos 1 2 2?2?2 2+1 2 1 2 2 2+ ?2?1?2 1 2 cos 1 2+( 2?2?2 ?1+
Deriving equations of motion: Da math part 3 Our two equations to solve are ? ?? ? 1 =?? ? 1 and ? ?? ? 2 = ?? ? 2 ?? ?? Plugging in our value for the lagrangian and taking appropriate derivatives we find that; ?1+ ?2?1 1 ) 2 ?1? ?1+ ?2 sin 1 ?2?2 2 ?2???? 2 Now we have a system of coupled, second order, non linear ordinary differential equations = ?2?2 2 cos 1 2 ?2?1?2 2 2sin( 1 = ?2?1 1 cos 1 2 + ?2?1 1 2sin 1 2
Hamiltonian System The Hamiltonian function is a quantity that is conserved for a system, that is ?? ??= 0 For the double pendulum this is the total energy H=T+U as the system is undamped and un-driven In general the Hamiltonian can be written as H= ???? Our two momentums are ? 1= ? 1 Solving now for H in terms of position and momentum we get ? ?? ?? ? 2 and ? 2=
Hamiltonian System Part 2 For a given system ?? Hamiltonian if ?? ??= ? ?,? ????? ??=?? ??= ? ?,? ??, exists if ?? ?? and ?? ??= ?? ??= ?? ?? Solving these equations using our coordinates ? 1,? 2, 1 ??? 2we find; ?? 2 ?? 2 ?? 1 ?? 1 and ? 2 Our Hamiltonian exists ? 1 ? 1= ? 2=
Linearization Equilibrium Points { 1, 2, 1, 2} (0,0,0,0) Stable (Pi,0,0,0) Unstable (0,Pi,0,0) Unstable (Pi,Pi,0,0) Unstable
(0,0,0,0) Imaginary Eigenvalues in 4D space.
(Pi,0,0,0),(0,Pi,0,0),(Pi,Pi,0,0) Same Jacobian and Eigenvalues
Parametric Plot Pendulum Lengths (l1 = 5, l2 = 10) Gravity (9.81) Donut Effect https://www.youtube.c om/watch?v=QXf95_EK S6E
Chaos Sensitivity to the initial conditions Dense Orbit Topological mixing
Sensitivity of the Initial Conditions Small change in initial conditions will result in a great change in long- term.
Sensitivity of the Initial Conditions Lyapunov Exponents Sensitivity classify the type of attractor
Dense Orbit Basically, solutions that are arbitrarily close will eventually behave very differently
Topological Mixing Basically, solutions that are arbitrarily far will eventually come together Strange Attractor 4-D System, 4-D Object 3-D cross-sectionals










")
,(0,Pi,0,0),(Pi,Pi,0,0)")