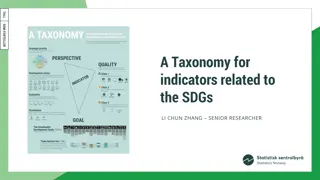
Automated Driving Systems Taxonomy & Definitions - SAE J3016 Overview
This overview discusses the alignment of international conventions regarding definitions of Automated Driving Systems (ADS) as outlined in SAE J3016. It covers the purpose, availability of SAE J3016, differences in regulations, the use of "autonomous" vs. "automated," and the concept of requesting human intervention in ADS operations. The content emphasizes the importance of standard definitions and terminology in the development and regulation of ADS.

Download Presentation

Please find below an Image/Link to download the presentation.
The content on the website is provided AS IS for your information and personal use only. It may not be sold, licensed, or shared on other websites without obtaining consent from the author.If you encounter any issues during the download, it is possible that the publisher has removed the file from their server.
You are allowed to download the files provided on this website for personal or commercial use, subject to the condition that they are used lawfully. All files are the property of their respective owners.
The content on the website is provided AS IS for your information and personal use only. It may not be sold, licensed, or shared on other websites without obtaining consent from the author.
E N D
Presentation Transcript
ACSF Automated Driving Systems Taxonomy and Definitions - SAE J3016 Jean-Michel Roy Transport Canada
Purpose Ensure alignment with international conventions for taxonomy and definitions related to Automated Driving Systems (ADS) SAE J3016 (Jun 2018) ISO 22736 (In joint development with SAE)
SAE J3016 Freely available via SAE website Convention, not specification Levels of Automation are widely cited (Level 0 to Level 5) Contains definitions and explanations for a variety of terms It is expected that ISO 22736 will be aligned with SAE J3016 After SAE J3016 was published in January 2014, the International Organization of Motor Vehicle Manufacturers (Organisation Internationale des Constructeurs d Automobiles, a.k.a., OICA) adopted the BASt levels and aligned them (in English) with SAE J3016, including adding a sixth level to represent full driving automation.
ACSF Draft regulations In some cases we have different definitions or different terminology Would be easier to align with SAE J3016 at this stage then later in the process
(Non) Use of Autonomous in jurisprudence, autonomy refers to the capacity for self-governance. In this sense, also, autonomous is a misnomer as applied to automated driving technology, because even the most advanced ADSs are not self-governing. Rather, ADSs operate based on algorithms and otherwise obey the commands of users. Should exclusively use automated to avoid legal/interpretation issues
Request to Intervene The situation where a system can no longer perform the Dynamic Driving Tasks (DDT), SAE J3016 indicates the system should issue a request to intervene Notification by an ADS to a fallback-ready user indicating that s/he should promptly perform the DDT fallback, which may entail resuming manual operation of the vehicle (i.e., becoming a driver again), or achieving a minimal risk condition if the vehicle is not drivable. In current ACSF text this procedure is named Transition Demand Note that Take over request is widely used in human factors studies - may be a better alternative?
Request to Intervene - Example A level 3 ADS experiences a DDT performance- relevant system failure in one of its radar sensors, which prevents it from reliably detecting objects in the vehicle s pathway. The ADS responds by issuing a request to intervene to the DDT fallback-ready user. The ADS continues to perform the DDT, while reducing vehicle speed, for several seconds to allow time for the DDT fallback-ready user to resume operation of the vehicle in an orderly manner.
Minimal Risk Condition vs Failure Mitigation MRC: A condition to which a user or an ADS may bring a vehicle after performing the DDT fallback in order to reduce the risk of a crash when a given trip cannot or should not be completed. FM: strategy designed to bring the vehicle to a controlled stop wherever the vehicle happens to be, if the driver fails to supervise the feature s performance (level 2), or if the fallback-ready user fails to perform the fallback when prompted (level 3).
Minimal Risk Condition vs Failure Mitigation - Continued Graphic taken from SAE J3016
Minimal Risk Condition vs Failure Mitigation - Continued Propose that the regulation require a Failure mitigation component ( level 3 system) After transition period stop in lane, or if equipped move to shoulder and stop. Would also allow a minimal risk manoeuver ( Level 3 or level 4 systems) Use appropriate manoeuver to achieve minimal risk condition Based on situation: pull over to a certain location, stop on shoulder, next rest stop, etc. Stopping in-lane would not be an acceptable minimal risk condition unless catastrophic situation
Interesting notes on Level 3 we could consider May perform fallback to Minimal risk condition in some cases (not only level 4) A level 3 ADS s DDT fallback-ready user is also expected to be receptive to evident DDT performance-relevant system failures in vehicle systems that do not necessarily trigger an ADS-issued request to intervene, such as a broken body or a suspension component. In the event of a DDT performance-relevant system failure in a level 3 ADS or in the event that the ADS will soon exit its ODD, the ADS will issue a request to intervene within sufficient time for a typical person to respond appropriately to the driving situation at hand.
Thank you for your attention Questions?




 Use of Autonomous")