Priority Queues and Heaps in Java
 undefined
undefined


PRIORITY QUEUES & HEAPS
Lecture 14
CS2110 Spring 2019




Announcements
Prelim tonight
Room assignments on website
2
JavaHyperText Topics
Interface, implements
Stack, queue
Priority queue
Heaps, heapsort
3
Interface vs. Implementation
Interface:
the operations
of an ADT
What you see on
documentation web
pages
Method names and
specifications
Abstract from details:
what
to do, not
how
to
do it
Java syntax:
interface
Implementation:
the code
for a data structure
What you see in
source
files
Fields and method
bodies
Provide the details:
how
to do operation
Java syntax:
class
4
Could be many implementations
of an interface
e.g. List: ArrayList, LinkedList
ADTs (interfaces)
5
Implementations of ADTs
6
Efficiency Tradeoffs
7
Which implementation to choose depends
on expected workload for application
Priority Queues
8
Priority Queue
Primary operation:
Stack: remove
newest
element
Queue: remove
oldest
element
Priority queue: remove
highest priority
element
Priority:
Additional information for each element
Needs to be
Comparable
9
Priority Queue
10
java.util.PriorityQueue<E>
11
class PriorityQueue<E> { boolean
add
(E e);
//insert e.
E
poll
();
//remove&return min elem.
E
peek
();
//return min elem.
boolean
contains
(E e);
boolean
remove
(E e);
int
size
();
...
}
Implementations
12
LinkedList
add()
put new element at front – O(1)
poll()
must search the list – O(n)
peek()
must search the list – O(n)
LinkedList that is always sorted
add()
must search the list – O(n)
poll()
highest priority element at front – O(1)
peek()
same – O(1)
Balanced BST
add()
must search the tree & rebalance – O(log n)
poll()
same – O(log n)
peek()
same – O(log n)
Can we do better?
Heaps
13
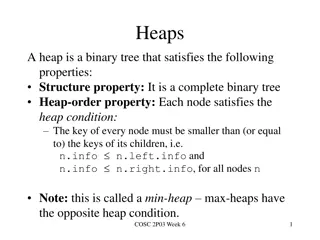
A Heap..
14
Is a
binary tree satisfying 2 properties:
1)
Completeness.
Every level of the tree (except last) is
completely filled, and on last level nodes are as far
left as possible.
55
22
38
19
12
21
4
6
10
8
Completeness
15
Every level (except last)
completely filled.
Nodes on bottom level are as
far left as possible.
missing nodes
Completeness
16
Not a heap because:
•
missing a node on level 2
•
bottom level nodes are not
as far left as possible
55
22
38
19
12
4
10
8
A Heap..
17
Is a
binary tree satisfying 2 properties:
1)
Completeness.
Every level of the tree (except last) is
completely filled, and on last level nodes are as far
left as possible.
2)
Heap-order.
Max-Heap:
e
very element in tree is <= its parent
Min-Heap:
every element in tree is >= its parent
“max on top”
“min on top”
Every element is <= its parent
18
Heap-order (max-heap)
55
22
38
19
12
2
4
6
10
18
Piazza Poll #1
19
A Heap..
20
Is a binary tree satisfying 2 properties
1)
Completeness.
Every level of the tree (except last) is
completely filled. All holes in last level are all the way
to the right.
2)
Heap-order.
Max-Heap:
every element in tree is <= its parent
Primary operations:
1)
add(e): add a new element to the heap
2)
poll(): delete the max element and return it
3)
peek(): return the max element
Priority queues
🎉 🎉 🎉
Heaps can implement priority queues
🎉 🎉 🎉
Each heap node contains priority of a queue item
(For values+priorities, see JavaHyperText)
21
Priority queues
🎉 🎉 🎉
Heaps can implement priority queues
🎉 🎉 🎉
Efficiency we will achieve:
add(): O(log n)
poll(): O(log n)
peek(): O(1)
No linear time operations: better than lists
peek() is constant time: better than balanced trees
22
Heap Algorithms
23
24
55
22
38
19
12
2
4
6
10
18
50
1.
Put in the new element in a new node (leftmost empty leaf)
Heap: add(e)
25
55
22
38
19
12
2
4
6
10
18
50
19
50
22
50
1.
Put in the new element in a new node (leftmost empty leaf)
2.
Bubble new element up while greater than parent
Time is O(log n)
Heap: add(e)
26
55
38
12
2
4
6
10
18
19
22
50
1.
Save root element in a local variable
55
Heap: poll()
27
55
38
12
2
4
6
10
18
19
22
50
1.
Save root element in a local variable
2.
Assign last value to root, delete last node.
55
19
Heap: poll()
19
28
55
38
12
2
4
6
10
18
22
50
1.
Save root element in a local variable
2.
Assign last value to root, delete last node.
3.
While less than a child, switch with bigger child (bubble down)
Time is O(log n)
55
19
19
19
50
22
Heap: poll()
29
Heap: peek()
50
22
38
19
12
2
4
6
10
18
50
1.
Return root value
Time is O(1)
(max heap)
Heap Implementation
30
Tree implementation
31
public class HeapNode<E> {private E value;
private HeapNode left;
private HeapNode right;
...
}
But since tree is complete, even more space-
efficient implementation is possible…
Array implementation
32
public class Heap<E> {(* represent tree as array *)
private E[] heap;
...
}
Numbering tree nodes
55
22
38
19
12
21
4
6
Number node starting at root
row by row, left to right
Same order as
level-order traversal
0
1
2
3
9
6
5
7
8
4
k=3
2(3)+1 = 7
2(3)+2 = 8
Represent tree with array
•
Store node number i in index i
of array b
•
Children of b[k] are b[2k +1]
and b[2k +2]
•
Parent of b[k] is b[(k-1)/2]
parent
children
55
22
38
19
12
21
4
6
0
1
2
3
9
6
5
7
8
4
55
38
22
35
12
19
21
20
6
4
0 1 2 3 4 5 6 7 8 9
class Heap<E> {E[] b;
// heap is b[0..n-1]
int n;
/** Create heap with max size */
public Heap(int max) {b= new E[max];
// n == 0, so heap invariant holds
// (completeness & heap-order)
}
}
Constructor
35
class Heap<E> {/** Add e to the heap */
public void
add
(E e) {b[n]= e;
n= n + 1;
bubbleUp(n - 1);
// on next slide
}
}
36
add() (assuming enough room in array)
class Heap<E> {/** Bubble element #k up to its position.
* Pre: heap inv holds except maybe for k */
private void bubbleUp(int k) {// inv: p is parent of k and every element
// except perhaps k is <= its parent
while ( ) {}
}
37
add().
heap is in b[0..n-1]
int p= (k-1)/2;
k > 0 && b[k].compareTo(b[p]) > 0
swap(b[k], b[p]);
k= p;
p= (k-1)/2;
/** Return largest element
* (return null if list is empty) */
public E poll() {if (n == 0) return null;
return b[0]; /
/ largest value at root.
}
38
peek()
/** Remove and return the largest element
* (return null if list is empty) */
public E poll() {if (n == 0) return null;
E v= b[0];
// largest value at root
n= n – 1;
// move last
b[0]= b[n];
// element to root
bubbleDown();
// on next slide
return v;
}
39
poll().
heap is in b[0..n-1]
/** Bubble root down to its heap position.
Pre: b[0..n-1] is a heap except maybe b[0] */
private void bubbleDown() {// inv: b[0..n-1] is a heap except maybe b[k] AND
// b[c] is b[k]’s biggest child
while ( ) {}
}
40
int k= 0;
int c= biggerChild(k);
// on next slide
c < n && b[k] < b[c]
swap(b[k], b[c]);
k= c;
c= biggerChild(k);
poll()
/** Return index of bigger child of node k */
public int
bigger
Child(int k) {int c= 2*k + 2;
// k’s right child
if
(
c >= n ||
b[c-1] > b[c]
)
c= c-1;
return c;
}
41
poll()
Piazza Poll #2
42
Efficiency
43
class PriorityQueue<E> { TIME*
boolean
add
(E e);
//insert e.
log
E
poll
();
//remove&return min elem.
log
E
peek
();
//return min elem.
constant
boolean
contains
(E e);
linear
boolean
remove
(E e);
linear
int
size
();
constant
}
*
IF
implemented with a heap!
(if time, in JavaHyperText if not)
Heapsort
44
Heapsort
45
55
4
12
6
14
0 1 2 3 4
Goal: sort this array
in place
Approach: turn the array into a heap and then poll repeatedly
Heapsort
46
55
4
12
6
14
0 1 2 3 4
55
12
4
14
0
1
2
3
4
6
4
14
55
4
12
6
14
6
// Make b[0..n-1] into a
max
-heap (in place)
4
14
6
6
Heapsort
47
0 1 2 3 4
55
12
4
14
0
1
2
3
4
6
4
14
6
4
12
6
14
4
55
6
14
6
6
// Make b[0..n-1] into a
max
-heap (in place)
// inv: b[0..k] is a heap, b[0..k] <= b[k+1..], b[k+1..] is sorted
for (k= n-1; k > 0; k= k-1) {b[k]= poll – i.e., take max element out of heap.
}
55
6
6
14
55
Heapsort
48
0 1 2 3 4
12
4
14
0
1
2
3
4
6
4
14
6
55
4
12
6
14
4
6
6
14
6
55
14
6
14
4
14
12
4
12
4
6
4
12
12
4
6
6
6
4
4
4
// Make b[0..n-1] into a
max
-heap (in place)
// inv: b[0..k] is a heap, b[0..k] <= b[k+1..], b[k+1..] is sorted
for (k= n-1; k > 0; k= k-1) {b[k]= poll – i.e., take max element out of heap.
}
Announcements
Prelim tonight
Room assignments on website
49
Explore the concepts of priority queues, heaps, and their implementations in Java. Learn about efficiency tradeoffs, interface vs. implementation, and the primary operations of priority queues. Discover the importance of comparable elements and the various data structures used for efficient operations in CS2110.

Download Presentation

Please find below an Image/Link to download the presentation.
The content on the website is provided AS IS for your information and personal use only. It may not be sold, licensed, or shared on other websites without obtaining consent from the author.If you encounter any issues during the download, it is possible that the publisher has removed the file from their server.
You are allowed to download the files provided on this website for personal or commercial use, subject to the condition that they are used lawfully. All files are the property of their respective owners.
The content on the website is provided AS IS for your information and personal use only. It may not be sold, licensed, or shared on other websites without obtaining consent from the author.
E N D
Presentation Transcript
PRIORITY QUEUES & HEAPS Lecture 14 CS2110 Spring 2019
Announcements 2 Prelim tonight Room assignments on website
JavaHyperText Topics 3 Interface, implements Stack, queue Priority queue Heaps, heapsort
Interface vs. Implementation 4 Interface: the operations of an ADT What you see on documentation web pages Method names and specifications Abstract from details: what to do, not how to do it Java syntax: interface Implementation: the code for a data structure What you see in source files Fields and method bodies Provide the details: how to do operation Java syntax: class Could be many implementations of an interface e.g. List: ArrayList, LinkedList
ADTs (interfaces) 5 ADT List Set Map Stack Queue Priority Queue Description Ordered collection (aka sequence) Unordered collection with no duplicates Collection of keys and values, like a dictionary Last-in-first-out (LIFO) collection First-in-first-out (FIFO) collection Later this lecture!
Implementations of ADTs 6 Interface List Set Map Stack Queue Priority Queue Implementation (data structure) ArrayList, LinkedList HashSet, TreeSet HashMap, TreeMap Can be done with a LinkedList Can be done with a LinkedList Can be done with a heap later this lecture!
Efficiency Tradeoffs 7 Class: ArrayList LinkedList chained nodes O(1) O(n) Backing storage: array prepend(val) O(n) get(i) O(1) Which implementation to choose depends on expected workload for application
Priority Queue 9 Primary operation: Stack: remove newest element Queue: remove oldest element Priority queue: remove highest priority element Priority: Additional information for each element Needs to be Comparable
Priority Queue 10 Priority 0 1 2 2 Task Practice for swim test Learn the Cornell Alma Mater Study for 2110 prelim Find Eric Andre ticket for sale
java.util.PriorityQueue<E> 11 class PriorityQueue<E> { boolean add(E e); //insert e. E poll(); //remove&return min elem. E peek(); //return min elem. boolean contains(E e); boolean remove(E e); int size(); ... }
Implementations 12 LinkedList add() put new element at front O(1) poll()must search the list O(n) peek() must search the list O(n) LinkedList that is always sorted add() must search the list O(n) poll() highest priority element at front O(1) peek() same O(1) Balanced BST add() must search the tree & rebalance O(log n) poll() same O(log n) peek() same O(log n) Can we do better?
Heaps 13
A Heap.. 14 Is a binary tree satisfying 2 properties: 1) Completeness. Every level of the tree (except last) is completely filled, and on last level nodes are as far left as possible. Do not confuse with heap memory different use of the word heap.
Completeness 15 Every level (except last) completely filled. 55 Nodes on bottom level are as far left as possible. 38 22 35 12 19 21 20 6 4 10 8
Completeness 16 Not a heap because: missing a node on level 2 55 bottom level nodes are not as far left as possible 38 22 35 12 19 20 4 10 8 missing nodes
A Heap.. 17 Is a binary tree satisfying 2 properties: 1) Completeness. Every level of the tree (except last) is completely filled, and on last level nodes are as far left as possible. 2) Heap-order. Max-Heap: every element in tree is <= its parent Min-Heap: every element in tree is >= its parent
Heap-order (max-heap) 18 Every element is <= its parent 55 38 22 35 12 19 2 20 6 4 10 18 Note: Bigger elements can be deeper in the tree!
A Heap.. 20 Is a binary tree satisfying 2 properties 1) Completeness. Every level of the tree (except last) is completely filled. All holes in last level are all the way to the right. 2) Heap-order. Max-Heap: every element in tree is <= its parent Primary operations: 1) add(e): add a new element to the heap 2) poll(): delete the max element and return it 3) peek(): return the max element
Priority queues 21 Heaps can implement priority queues Each heap node contains priority of a queue item (For values+priorities, see JavaHyperText)
Priority queues 22 Heaps can implement priority queues Efficiency we will achieve: add(): O(log n) poll(): O(log n) peek(): O(1) No linear time operations: better than lists peek() is constant time: better than balanced trees
Heap: add(e) 24 55 38 22 35 12 19 2 20 6 4 10 18 50 1. Put in the new element in a new node (leftmost empty leaf)
Heap: add(e) 25 Time is O(log n) 55 22 50 38 19 50 22 35 12 2 20 6 4 10 18 50 19 1. Put in the new element in a new node (leftmost empty leaf) 2. Bubble new element up while greater than parent
Heap: poll() 26 55 55 38 50 35 12 22 2 19 20 6 4 10 18 1. Save root element in a local variable
Heap: poll() 27 55 19 55 38 50 35 12 22 2 19 19 20 6 4 10 18 1. Save root element in a local variable 2. Assign last value to root, delete last node.
Heap: poll() 28 Time is O(log n) 55 19 50 55 38 50 19 22 35 12 22 19 2 20 6 4 10 18 1. Save root element in a local variable 2. Assign last value to root, delete last node. 3. While less than a child, switch with bigger child (bubble down)
Heap: peek() 29 50 Time is O(1) 50 38 22 35 12 19 2 20 6 4 10 18 1. Return root value
Heap Implementation 30 (max heap)
Tree implementation 31 public class HeapNode<E> { private E value; private HeapNode left; private HeapNode right; ... } But since tree is complete, even more space- efficient implementation is possible
Array implementation 32 public class Heap<E> { (* represent tree as array *) private E[] heap; ... }
Numbering tree nodes Number node starting at root row by row, left to right 55 0 Same order as level-order traversal 38 22 1 2 35 12 19 21 3 k=3 4 5 6 20 6 4 7 8 9 2(3)+1 = 7 2(3)+2 = 8 Children of node k are nodes 2k+1 and 2k+2 Parent of node k is node (k-1)/2
Represent tree with array Store node number i in index i of array b Children of b[k] are b[2k +1] and b[2k +2] Parent of b[k] is b[(k-1)/2] 55 0 38 22 1 2 35 12 19 21 3 4 5 6 20 6 4 7 8 9 parent 0 1 2 3 4 5 6 7 8 9 0 1 2 3 4 5 6 7 8 9 55 38 22 35 12 19 21 20 6 4 children
Constructor 35 class Heap<E> { E[] b; // heap is b[0..n-1] int n; /** Create heap with max size */ public Heap(int max) { b= new E[max]; // n == 0, so heap invariant holds // (completeness & heap-order) } }
add() (assuming enough room in array) 36 class Heap<E> { /** Add e to the heap */ public void add(E e) { b[n]= e; n= n + 1; bubbleUp(n - 1); // on next slide } }
add(). heap is in b[0..n-1] 37 class Heap<E> { /** Bubble element #k up to its position. * Pre: heap inv holds except maybe for k */ private void bubbleUp(int k) { int p= (k-1)/2; // inv: p is parent of k and every element // except perhaps k is <= its parent while ( ) { k > 0 && b[k].compareTo(b[p]) > 0 swap(b[k], b[p]); k= p; p= (k-1)/2; } }
peek() 38 /** Return largest element * (return null if list is empty) */ public E poll() { if (n == 0) return null; return b[0]; // largest value at root. }
poll(). heap is in b[0..n-1] 39 /** Remove and return the largest element * (return null if list is empty) */ public E poll() { if (n == 0) return null; E v= b[0]; // largest value at root n= n 1; // move last b[0]= b[n]; // element to root bubbleDown(); // on next slide return v; }
poll() 40 /** Bubble root down to its heap position. Pre: b[0..n-1] is a heap except maybe b[0] */ private void bubbleDown() { int k= 0; int c= biggerChild(k); // on next slide // inv: b[0..n-1] is a heap except maybe b[k] AND // b[c] is b[k] s biggest child while ( ) { c < n && b[k] < b[c] swap(b[k], b[c]); k= c; c= biggerChild(k); } }
poll() 41 /** Return index of bigger child of node k */ public int biggerChild(int k) { int c= 2*k + 2; // k s right child if (c >= n || b[c-1] > b[c]) c= c-1; return c; }
Efficiency 43 class PriorityQueue<E> { TIME* boolean add(E e); //insert e. log E poll(); //remove&return min elem. log E peek(); //return min elem. constant boolean contains(E e); linear boolean remove(E e); linear int size(); constant } *IF implemented with a heap!
Heapsort 44 (if time, in JavaHyperText if not)
Heapsort 45 0 1 2 3 4 55 4 12 6 14 Goal: sort this array in place Approach: turn the array into a heap and then poll repeatedly
Heapsort 46 // Make b[0..n-1] into a max-heap (in place) 55 0 0 1 2 3 4 6 4 14 6 55 4 12 6 14 55 4 12 6 14 4 6 14 12 1 2 6 4 14 6 4 3
Heapsort 47 // Make b[0..n-1] into a max-heap (in place) // inv: b[0..k] is a heap, b[0..k] <= b[k+1..], b[k+1..] is sorted for (k= n-1; k > 0; k= k-1) { b[k]= poll i.e., take max element out of heap. } 55 55 6 14 0 0 1 2 3 4 4 12 6 14 6 55 6 14 4 55 6 4 6 14 6 12 1 2 6 4 14 6 4 3
Heapsort 48 // Make b[0..n-1] into a max-heap (in place) // inv: b[0..k] is a heap, b[0..k] <= b[k+1..], b[k+1..] is sorted for (k= n-1; k > 0; k= k-1) { b[k]= poll i.e., take max element out of heap. } 14 12 6 4 6 14 4 12 6 0 0 1 2 3 4 55 4 12 6 14 14 6 12 4 12 4 6 6 4 4 4 6 14 55 4 6 14 6 4 12 4 1 2 6 4 14 6 4 3
Announcements 49 Prelim tonight Room assignments on website




")












")





")
")
")
")
")
")






 (assuming enough room in array)")
. heap is in b[0..n-1]")
")
. heap is in b[0..n-1]")
")
")