Incorporating General Relativity into Quantum Theory through Riemannian Geometry
Framing Riemannian Geometry as a Generalized Lie Algebra to combine General Relativity with Quantum Theory. The proposal extends Heisenberg Algebra to incorporate a more general geometry, allowing for a function of position in commutator relationships. The discussion covers historical developments, including the Lorentz-Lie group, Minkowski metric, and foundational work by Einstein, Schrödinger, Heisenberg, and Dirac. The problem statement addresses relativistic quantum theory and Lie algebras in the context of the standard model of particle physics.

Download Presentation

Please find below an Image/Link to download the presentation.
The content on the website is provided AS IS for your information and personal use only. It may not be sold, licensed, or shared on other websites without obtaining consent from the author.If you encounter any issues during the download, it is possible that the publisher has removed the file from their server.
You are allowed to download the files provided on this website for personal or commercial use, subject to the condition that they are used lawfully. All files are the property of their respective owners.
The content on the website is provided AS IS for your information and personal use only. It may not be sold, licensed, or shared on other websites without obtaining consent from the author.
E N D
Presentation Transcript
Riemannian Geometry Framed as a Generalized Lie Algebra to Incorporate General Relativity with Quantum Theory Joseph E. Johnson,PhD Department of Physics & Astronomy, University of South Carolina, Columbia SC, 29208 January 19, 2023 Joseph E. Johnson, PhD ; Department of Physics and Astronomy, University of South Carolina 1
Introduction Some History 1854 Bertrand Riemann; Riemannian Geometry 1865 James Clark Maxwell Maxwell s Equations prediction that the velocity of light is a constant c, 1870 Marius Sophus Lie: Lie Algebras 1887 Michelson Morley experiment: c is constant 1889 Lorentz contraction proposed Explain the MM experimental results January 19, 2023 Joseph E. Johnson, PhD ; Department of Physics and Astronomy, University of South Carolina 2
1905 Einsteins theory of special relativity the Lorentz Lie group of space-time transformation Lorentz contraction implies that space-time is Riemannian (not Euclidian) 1906 Henri Poincare: 1908 Hermann Minkowski Minkowski metric +1, -1, -1, -1 1915 Albert Einstein: 1926 Erwin Schr dinger: 1925 Werner Heisenberg: 1930 Paul Dirac: Dirac showed that the Schr dinger and Heisenberg formulations are equivalent Poincare Lie Algebra & Group Theory of General Relativity Schr dinger equation Heisenberg s Equation & Lie algebra Dirac Formulation and Notation: QT Standard Model of Particle Theory continues to evolve at the present January 19, 2023 Joseph E. Johnson, PhD ; Department of Physics and Astronomy, University of South Carolina 3
What is proposed in simple language In Quantum Mechanics one has operators for (Heisenberg Algebra) Position Xi and Momentum Pi with Commutation Rules: [Xi, Pj] = i gij , [Xi, Xj] = 0 , [Pi, Pj] = 0 giving P as a translation operator where gij = ij the delta function. To allow for a more general (Riemannian) geometry: We generalize this to allow the commutator to be a function of X: [Xi, Pj] = i gij (X) with [Xi, Xj] = 0 , and P still as the translation operator January 19, 2023 Joseph E. Johnson, PhD ; Department of Physics and Astronomy, University of South Carolina 4
The Problem 1. The relativistic quantum theory of fundamental particles and their interactions is well established in terms of the Lie Algebras of quantum theory (QT) , special relativity (SR), and the standard model (SM) of particles for the electroweak and strong forces. These foundations are the Poincare Lie algebra (PA) and Heisenberg Lie algebra adjoined with the U(1) x SU(2) x SU(3) (SM) Lie algebra standard model of quarks, leptons, vector gauge particles, and the Higgs boson. But the gravitational interaction is described by Einstein s nonlinear differential equations of General Relativity (GR) and is framed in a totally different mathematical arena of Riemannian Geometry (RG). This presentation will show that RG and GR can also be framed in a new and more general Lie algebra where the structure constants are functions of the commuting subalgebra allowing a blending of QT, SR, and the SM with GR. 2. 3. 4. January 19, 2023 Joseph E. Johnson, PhD ; Department of Physics and Astronomy, University of South Carolina 5
Notation of States and Operators (measurements) States of systems are often given as an abstract vector in some space: U or V The Scalar product of two vectors is < U | V > = |U| |V| cos UV But we need a coordinate system to express the vector such as |i> with i = 1, 2, 3 We prefer to have the coordinate vectors orthonormal < i | j > = ij(scalar product} Write a unit projection operator as 1 = i| i >< i | to expand |U> in that basis: Thus |U> = 1 |U> = i| i >< i | U > = Ui | i > Where Uiare the components of the vector U on the basis | i > An important basis set of vectors is given by the eigenvalues of the operators: A | a > where A | a > = a | a > thus the measurement of A gives the value a January 19, 2023 Joseph E. Johnson, PhD ; Department of Physics and Astronomy, University of South Carolina 6
A Deeper Philosophy Observations or Measurements A, B, are represented as operators A that act upon some physical system A| > = | > . Operators may interfere with each other so AB - BA = [A, B] = C 0 The Operators (measurements) must close under the [ , ] operation to form a Lie algebra of fundamental observables such as momentum, space, time, energy, angular momentum, spin, mass, etc. That which exists must be a mathematical representation of the Lie algebra of observations and actions upon things that exist. Thus, that which exists is a representation of the algebra of actions. January 19, 2023 Joseph E. Johnson, PhD ; Department of Physics and Astronomy, University of South Carolina 7
Fundamental observables can then be expressed in terms of Lie algebras and Groups 1. Our fundamental laws of physics for isolated systems must be unchanged under translations in space and time 2. Translations are generated by the Heisenberg Lie algebra (HA): 1. [P X = i g and is the foundation of quantum theory, with [P P = 0, [X X = 0, [P I = 0, and [X = 0, 3. The Heisenberg Lie group is generated by T(a) = exp(a P i ) 1. P = (E/c, p) is the four-momentum& energy 2. X = (ct, x) is the four-position of events in space-time. January 19, 2023 Joseph E. Johnson, PhD ; Department of Physics and Astronomy, University of South Carolina 8
Our laws must also be unchanged for rotations & Lorentz transformations generated by the Lorentz Lie algebra: L 1. The mathematics of rotations and Lorentz transformations is expressed in the Lorentz Lie algebra and the Lie group it generates. 1. [L X = i (g X + g X ) 2. [L P = i (g P + g P ) 3. L L = i (g L + g L g L + g L ) 4. The Heisenberg and Lorentz algebras define the Poincare Lie Algebra (PA) The Group Transformations for X and P are given by : X -> M X 1. Where M is given by: M = exp( L i ) 2. Where L is the four-tensor of angular momentum: L = X P X P 3. The representations of the Poincare Lie algebra and group are much easier to understand if the Poincare algebra is extended to include X along with equation 1 and the Heisenberg algebra (last slide) 2. January 19, 2023 Joseph E. Johnson, PhD ; Department of Physics and Astronomy, University of South Carolina 9
Representations of the Poincare Algebra - Dirac Notation for the State of a System The operators (algebras, groups ) act upon the system state | .> representing a physical system where the state is represented by a vector in a Hilbert space (infinite dimensional vector space) designated by the eigenvalues of a complete set of commuting (non- interfering) operators: |k , b0, b1, s, > or |y , b0, b1, s, > One can also write m2 = g k k or |k> = |m, (k0), k> = a+m, (k0), k |0> The representation space of the eigenvalues of all commuting observables in the Poincare group is rather complicated with not just the four momentum but also the spin which is given by a vast spectrum of possible spins: s, and its third component along with two Casimir operators bo and b1. January 19, 2023 Joseph E. Johnson, PhD ; Department of Physics and Astronomy, University of South Carolina 10
C: Group A Group is a set, A, B, C, and an operationA* B 1. Such that the operation that combines two elements gives: 2. Closure: to produce a third element A*B = C 3. Is Associative: A*(B*C) = (A*B)*C 4. Has an identity element I exists A*I = A = I*A, and 5. Has an inverse A-1 : A*A-1 = I = A-1*A 6. Example: Rotations of a square by 0, 90, 180, & 270 deg. 1. January 19, 2023 Joseph E. Johnson, PhD ; Department of Physics and Astronomy, University of South Carolina 11
a . Lie Algebra A Lie Algebra is a linear vector space over a field together with a. a binary operation called a Lie Bracket [ A, B ] = C with: b. bilinearity [ax+by, z] = a[x,z] + b[y,z] and [[z, ax+by] = a[z,x] +b[z,y] c. Alternativity: [x,x] =0 d. Jacobi identity: [x,[y,z]] + [y,[z,x]] + [z,[x,y]] from which e. Anticommutativity then follows: [x,y] = -[y,x] thus [x,x] =0 Generally [Ai, Aj] = cijk Ak (summation over repeated indices) where cijk are a set of constants thus giving a linear combination of the basis operators January 19, 2023 Joseph E. Johnson, PhD ; Department of Physics and Astronomy, University of South Carolina 12
Groups with infinite numbers of elements: Groups such as translations and rotations have an infinite number of elements thus are problematic. Sophus Lee came up the idea of exponentiating the infinitesimal part of a group element with the appropriate multiplier to generate a complete set of the elements of a group of continuous transformations. January 19, 2023 Joseph E. Johnson, PhD ; Department of Physics and Astronomy, University of South Carolina 13
Example of the Lie Algebra of Rotations in two dimensions generated by a Lie Algebra Consider the infinite group of rotations in a plane with q infinitesimal: R(q) = cos(q) - sin (q) = 1 -q = 1 0 + q * 0 -1 = I + q L sin (q) + cos (q) q 1 0 1 1 0 These rotations can be generated by the exponentiation of the corresponding matrix for the infinitesimal transformation L as: R(q) = exp (q L ) = I + q L + (1/2!) (q L)2 + . Thus, one can say that the matrix L generates the matrix R and all such rotations simply by choosing the value of the angle. January 19, 2023 Joseph E. Johnson, PhD ; Department of Physics and Astronomy, University of South Carolina 14
Finite Groups and Systems Like Groups: There are three important discrete transformations that represent: T = Time Reversal P = Spatial Inversion of x, y, z and C = Particle (charge) Conjugation It was very surprising to learn in 1955 that physical systems were not invariant under spatial inversion (parity violation). It also become increasingly useful to consider transformations that describe approximate symmetry (changing protons into neutrons and conversely) the forerunner to our current Standard Model (SM). January 19, 2023 Joseph E. Johnson, PhD ; Department of Physics and Astronomy, University of South Carolina 15
Mathematical Equivalence of Riemannian Geometry to a Generalized Lie Algebra January 19, 2023 Joseph E. Johnson, PhD ; Department of Physics and Astronomy, University of South Carolina 16
Procedure: I will first show mathematically that Riemannian Geometry (RG) can be formulated as a generalized Lie algebra with structure constants that are functions of certain (Abelian) elements of the algebra. I will then show that this framework supports the exact equivalent expression of Einstein s formulation of general relativity (GR). I will use Dirac notation with bra & ket vectors as the Hilbert space basis, labeled with the eigenvalues of a maximum set of commuting operators from the algebra, scalar product, and decomposition of unity. January 19, 2023 Joseph E. Johnson, PhD ; Department of Physics and Astronomy, University of South Carolina 17
Abelian Algebra of Operators - notation Let X ( = 0, 1, 2, n-1) be the basis of an n-dimensional Abelian algebra of Hermitian operators representing a n simultaneous observables: [X , X ] = 0 such as time and space or another set of commuting observables. The n eigenvectors, |y>, of X can form the basis of a Hilbert representation space: X |y0, y1, , yn-1 > = y y> as represented by their eigenvalues y . January 19, 2023 Joseph E. Johnson, PhD ; Department of Physics and Astronomy, University of South Carolina 18
Notation, continued: The eigenvectors are normalized to unity as <ya|yb> = (y0a-y0b) (y1a-y1b) (yn-1a-yn-1b). And let the decomposition of unity 1 = dy|y><y| project the entire space onto the basis vectors |y> where <y|, is the dual vector to |y>. A general | > vector in the (Hilbert) space representing this Lie algebra can then be written as | > = dy|y><y| > = dy (y) |y>, and where (y) represents the components of the vector on the basis vectors |y> The scalar product is then < 1 > = = dy < |y><y| > = dy *(y) ( y ). January 19, 2023 Joseph E. Johnson, PhD ; Department of Physics and Astronomy, University of South Carolina 19
Now Define Operators D that Translate One in the X Eigenvalue Space: Let X = G X G-1 where G(ds, ) =exp(ds D /b) where b is a constant and ds is defined to be the unit distance moved in the direction of a unit vector ,. By taking ds to be infinitesimal, then one gets X = X (s+ds)= exp( ds D /b) X (s) exp(- ds D /b) = (1 + ds D /b) X (s) (1 - ds D /b) = X ( s ) + ds [ D X ]/b + higher order in ds., Thus, the commutator [D , X ] defines the way in which the transformations commute (interfere) with each other in executing the translations in keeping with the theory of Lie algebras and Lie groups. January 19, 2023 Joseph E. Johnson, PhD ; Department of Physics and Astronomy, University of South Carolina 20
The Case Where the |y> Space is Euclidian: If the Abelian space is Euclidian (flat) then there is no dependence of the D operator upon location,. Then [D , X ] can be normalized to I (since D is defined to translate X ) thus [D X = I = b where is the diagonal n x n matrix with 1 on the diagonal with off-diagonal terms zero. This is the customary Heisenberg Lie algebra with structure constants and with [D , D ] = 0 for . The additional operator, I, is to commute with all elements and by definition has a single eigenvalue b. It is needed to close the basis of the Lie algebra which is of dimension 2n+1. Thus, confirming that the translated distance is ds in the direction : dX ( s ) = ds [ D X ]/b = ds (b/b) =ds + higher order terms in ds January 19, 2023 Joseph E. Johnson, PhD ; Department of Physics and Astronomy, University of South Carolina 21
Now Allow for Curvature in the y space: We now allow the [D, X] commutator to be dependent upon the operators X as it will vary from point to point in the space. We define the functions g (X) as generalized structure functions (no longer constants): [D , X ] = I g (X) (with the requirement that |g| 0 ) thus generalizing the Heisenberg Lie algebra where I has the single eigenvalue b with the commutators [D , I ] = 0 = [X , I ], and [X , X ] = 0 . These generalized structure functions can now be written as g (X) = [D , X ]/b which are restricted to be an analytic functions of (X) with g (X) defined by g (X) g (X) = January 19, 2023 Joseph E. Johnson, PhD ; Department of Physics and Astronomy, University of South Carolina 22
Length using ds2 = g(X) dXdX Then X (s+ds) - X (s) = dX = ds g (X) = ds Then g (X) dX dX = ds2 g (X) = ds2 since is by definition a unit vector on this metric giving: ds2 = g (X) dX dX proving that g (X) is the metric for the space. January 19, 2023 Joseph E. Johnson, PhD ; Department of Physics and Astronomy, University of South Carolina 23
D in the Position (X) Diagonal Representation: <y| [D , X ]=[(b g (y) ( / y ) + (y) + A (y) , y ] <y| = [( b + (y) + A (y) ), y ] <y| = b g (y) <y| Thus <y| D = ( b g (y) ( / y ) + (y) + A (y) ) <y| which allows the D commutator to represent derivatives: <y| D | > = ( b g (y) ( / y ) + (y) +A (y) ) ) (y) = b (y) since [A (y), (y)] =0 , [ (y), (y)] =0 (y) = <y| > and = g (y) ( / y ) and where (y) and A (y) are a yet undetermined vector function of y . Thus: D =b g (y) (( / y ) + (y) + A (y) ) in this X representation. January 19, 2023 Joseph E. Johnson, PhD ; Department of Physics and Astronomy, University of South Carolina 24
The Christoffel symbols In RG: The Christoffel symbols are defined as: = ( ) ( , g + , g - , g ) and can be written in the position diagonal representation, in terms of the commutators of D with the metric as = ( ) (1/b) ( [D , g ] + [D , g ] - [ D , g ] ). Then using gab (X) = (1/b) [D a, Xb] one obtains =([D ,[D , X ]]+[D ,[D , X ]]-[ D ,[D ,X ]])/(2b2). January 19, 2023 Joseph E. Johnson, PhD ; Department of Physics and Astronomy, University of South Carolina 25
The Riemann and Ricci Tensors in RG: Using the definition of the Riemann tensor we get the R = (1/b) ( [D , ] - [D ] ) + ( ) And the Ricci tensor becomes: R = g R = (1/b) [D , X ] R and the curvature tensor is then: R = g R = (1/b) [D X ] R . January 19, 2023 Joseph E. Johnson, PhD ; Department of Physics and Astronomy, University of South Carolina 26
The Covariant Derivative: A covariant derivative of a contravariant vector A is A = A / y + A and the covariant derivative of a covariant vector A is given by A = A / y - A where both A and A transform as tensors with respect to the metric gab (y) . January 19, 2023 Joseph E. Johnson, PhD ; Department of Physics and Astronomy, University of South Carolina 27
Important Antisymmetric Tensors: Rotation and Lorentz transformations in each plane are given by the generator: L = X D - X D And another critical tensor is: F = [D , D ] Since length and angle depend only upon the symmetric part of g, it follows that the geometry is dependent only upon the symmetric part of g. January 19, 2023 Joseph E. Johnson, PhD ; Department of Physics and Astronomy, University of South Carolina 28
Application to General Relativity: Application to General Relativity: January 19, 2023 Joseph E. Johnson, PhD ; Department of Physics and Astronomy, University of South Carolina 29
Interpretation of X, D, and M in Physics: Now let X represent the n space time coordinates for events: X0 = ct and Xi= x, y, z, for the spatial dimensions (three or more dimensions) And D are the corresponding n generalized momenta D0 = E/c + A0 and Di = Pi + Ai (x) where A is a vector potential. which generate translations in X And M is the antisymmetric angular momentum tensor that generates rotations and Lorentz transformations and for a flat (Euclidian space) leaves g X X = invariant with g = (1, -1,-1, -1 ) diagonal the only non-zero terms January 19, 2023 Joseph E. Johnson, PhD ; Department of Physics and Astronomy, University of South Carolina 30
Poincare and Extended Poincare Algebras: The 4 D and 6 M operators form the 10-dimensional Poincare Lie algebra (PA) which is the symmetry algebra of all closed systems. One can adjoin the 4 X operators for space-time and an I operator to form a 15-parameter extended Poincare Lie algebra (EPA) using the covariant Heisenberg Lie algebra: [D , X ] = I g where I is an operator that commutes with all elements and has the unique eigenvalue i . All representations of this EPA were found and contain the PA. These PA (or EPA) representations give the representations of the free fundamental particles and support the standard model. January 19, 2023 Joseph E. Johnson, PhD ; Department of Physics and Astronomy, University of South Carolina 31
The Extended Poincare Lie Algebra: For Minkowski space-time one has : [I, D ] = [I, X ] = [I, M ] = 0 [D , X ] = i g , [D , D ] = 0 , [X , X ] = 0 [M , D ] = i (g D - g D ) D is a vector under the Lorentz group [M , X ] = i (g Xm - g X ) X is a vector under the Lorentz group [M , M ] = i (g Mnr + g M - g M - g M ). As particles (fields) can be created and destroyed, one implements the standard creation operator notation | > = a +|0> which creates the representation | where denotes the free particle Poincare representation from the EPA algebra for particles and interactions from the standard model, where |0> is the vacuum state. January 19, 2023 Joseph E. Johnson, PhD ; Department of Physics and Astronomy, University of South Carolina 32
Novel Aspects of the Proposed GLA The previous Euclidian metric g is now generalized to be a function of the space- time position operators and thus are now functions g(X) and given with: [D , X ] =b now changed to [D , X ] = i g (X) where we must set b = i The metric g is now seen as the interference of the D operators in translating X . Thus, the spatial curvature in GR is now seen as the commutator of generalized momentum with position. The commutator [D , D ] = 0 which was zero is now given by [D , D ] = -( g - g ) (X) term (for covariance) ( AC + AC G - AC - AC G )- CABC AA , AB where [AA , AB ] = CABC AA AB where the A, B, & C indices are those of the Standard Model. The metric is an integral part of D which also contains all other intermediate fields thus adding gravity to the SM with an associated gauge transformation. January 19, 2023 Joseph E. Johnson, PhD ; Department of Physics and Astronomy, University of South Carolina 33
Connection to Physics & General Relativity Connection to Physics & General Relativity January 19, 2023 Joseph E. Johnson, PhD ; Department of Physics and Astronomy, University of South Carolina 34
Connection to General Relativity (GR): We have already done the necessary background work to frame GR in terms of the operator algebra. The Einstein equations are: Rab - gab R + gab = (8 G/c4) Tab can now be written as Rab - (i [D a, Xb]) ( R - L ) = (8 G/c4) Tab where Rab and R are now given in terms of commutators as shown above while Tab is the energy-momentum tensor as determined by the SM. January 19, 2023 Joseph E. Johnson, PhD ; Department of Physics and Astronomy, University of South Carolina 35
Integration of the metric in the SM gauge transformations | > -> e | > to | > -> e (x) | > = | > (4.1) since this leaves invariant the scalar product < | > invariant. But a full invariance requires that the action of D on | > must also leave the scalar product invariant. Then it follows that when <y|D = ( i g (y) /y + (y) + A (y) ) <y| acts upon e (x) | > one gets: D <y|(e (x) | >) = ( i g (y) /y + (y) + A (y) ) (e (y) <y|| >) = e (y) ((i g (y) (y)/y ) + ( i g (y) /y + (y) + A (y) ) (<y|| >)). (4.2) (4.3) (4.4) January 19, 2023 Joseph E. Johnson, PhD ; Department of Physics and Astronomy, University of South Carolina 36
Thus, the gauge transformations give: So, it follows that A must also transform as A (y) -> A (y) - (i g (y) (y) /y ) which holds for ALL of the intermediate bosons in the SM in order to cancel the derivative of the position dependent phase (y). Thus. the metric function must now be included in the gauge transformations of the SM in this specific manner thereby integrating gravitation with the SM bosons. The (y) function disappears when the g (y) /y acts on a scalar function but when acting on a vector function (such as A (y) ) these Christoffel functions must be included in order to maintain Riemannian covariance and also when acting on the spinor functions (in a different form). January 19, 2023 Joseph E. Johnson, PhD ; Department of Physics and Astronomy, University of South Carolina 37
One also has an Altered Uncertainty Principle We now get the altered uncertainty principle in the gravitational field of a star: Xr Dr ( /2)(1/(1-rs/r)) and t Er ( /2) (1-rs/r) where rs = 2GM/c2 and where r = the distance to the center of the spherical mass. This is because the generalized algebra effectively alters the value of Planks constant in both the X1 and X0 directions as well as the wave nature of particles in the altered local Fourier transform. This might be observable in atomic transitions altered due to an altered pair production for vacuum polarization. What is maintained is a more general form of the Heisenberg uncertainty principle obtained by multiplying these two equations to obtain t Er Xr Dr ( /2)2 while the other two uncertainty relations remain unchanged January 19, 2023 Joseph E. Johnson, PhD ; Department of Physics and Astronomy, University of South Carolina 38
One can consider a small region of space with a Schwarzschild solution as g00 = (1 rs/y1 ) and g11 = -1/(1 rs/y1) where rs = 2GM/c2 with g22 = g33 = -1 where G is the gravitational constant, M is the mass of the star, c is the speed of light, and y1 is the distance to the center of the star giving g(X) January 19, 2023 Joseph E. Johnson, PhD ; Department of Physics and Astronomy, University of South Carolina 39
Extensions of Einsteins Equations: The equations of Einstein, R - (i [D , X ]) ( R - ) = G = (8 G/c4) = T , where G is the Einstein tensor, determine the metric of space-time as determined by the energy momentum tensor. But one can also consider another equation that alters the metric due to the angular momentum operator in the plane which is given by L = X D X D or equivalently by the angular momentum density m = X T - X T We now can insert the expression for the energy momentum tensor in terms of the Einstein tensor to get m = X T - X T = (X G X G ) (8 G/c4) or equivalently X G - X G = = (8 G/c4) m where both sides are divergentless like Einstein's equations. We are investigating this equation, if it is novel as a complement to Einstein s equations, and if it can lead to predictable results for galactic angular momentum and determine the 6 antisymmetric components of g. January 19, 2023 Joseph E. Johnson, PhD ; Department of Physics and Astronomy, University of South Carolina 40
Other Current Work: The generalized momentum D now contains quantized fields for both the A vectors fields as per the SM, and also a quantized metric g and the (X) term as a spin 2 massless Poincare representation. We are studying the associated gauge transformations that can link the SM with GR in this algebra and other possible observable consequences of this new algebra. January 19, 2023 Joseph E. Johnson, PhD ; Department of Physics and Astronomy, University of South Carolina 41
References: 1. Johnson, Joseph E. (1969) . Position Operators and Proper Time in Relativistic Quantum Mechanics . Phys. Rev Vol 181, 1755-1764 2. Johnson, Joseph E. (1971), Proper-Time Quantum Mechanics II , Phys. Rev. D, Vol 3 3. Johnson, Joseph E. & Chang K. K. (1974), Exact Diagonalization of the Dirac Hamiltonian in an External Field Phys. Rev. D, Vol 10 No. 8 4. Johnson, Joseph E. (2016), An Integration of General Relativity with Quantum Theory and the Standard Model. http://arxiv.org/abs/1606.00701 January 19, 2023 Joseph E. Johnson, PhD ; Department of Physics and Astronomy, University of South Carolina 42
Thank You This presentation is on my web site at www.asg.sc.edu As well as the current draft of my associated paper that is on arXiv. January 19, 2023 Joseph E. Johnson, PhD ; Department of Physics and Astronomy, University of South Carolina 43
January 19, 2023 Joseph E. Johnson, PhD ; Department of Physics and Astronomy, University of South Carolina 44
Some additional notes: January 19, 2023 Joseph E. Johnson, PhD ; Department of Physics and Astronomy, University of South Carolina 45
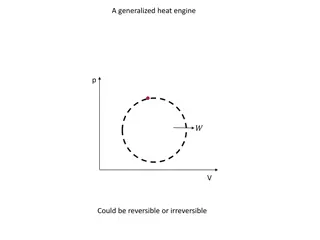
A challenge for graduate students: Define a Lie Algebra of the two matrices L12 = (-1, 0 /1, 0) and L21 = (0, 1 / 0, -1) that can model an increase in entropy. Then show that M(t) = exp(t(L12 + L21 ) ) generates Lie group of transformations that represent an increase in entropy when t>0 by expanding M(t) with its series definition. Explain how its action on any vector (u, v) with u>0, v>0 eventually gives an equilibrium of the same values: (w , w) where w = (u+v)/2. This models an aquarium with two equal sides separated by a membrane with a small hole separating clear water on one side from a red dye water in the other. As t nears infinity, all information is lost. January 19, 2023 Joseph E. Johnson, PhD ; Department of Physics and Astronomy, University of South Carolina 46
How a Lie algebra generates a Lie Group Translations: X = exp(i a P ) X exp(-i a P ) Rotations and Lorentz Transformations: P = exp(i L ) P exp(-i P ) X = exp(i L ) X exp(-i P ) A Lie algebra is the infinitesimal change in the transformation of a Lie group. This is how one deals with groups that have an infinite number of elements. January 19, 2023 Joseph E. Johnson, PhD ; Department of Physics and Astronomy, University of South Carolina 47
Dirac Notation for States of the System The state of a system is expressed as a vector in Hilbert space:| > The basis of the space is expressed in terms of a complete set of eigenvalues of commuting operators: | > using: Orthonormality: < | > = ( ) Completeness: | > < | = 1 (used to expand a vector in a basis) The Orthonormality gives: | > = 1 | > = | > < | > Or: | > = ( ) | > where ( ) = < | > Which are the coordinates of | > on the basis | > With 2nd quantization, one expresses this single particle state as + + a creation operator for the state acting on the vacuum. It will be understood that the final form for many particle systems to be as creation and annihilation operators. January 19, 2023 Joseph E. Johnson, PhD ; Department of Physics and Astronomy, University of South Carolina 48
A: Field: A Field is a set, along with two operations defined on that set: a. an addition operation written as a + b, and b.a multiplication operation written as a b, c.both of which behave similarly as they behave for rational numbers and real numbers, including an d. additive inverse a for all elements and a e. multiplicative inverse b 1for every nonzero element b. f. Examples: The Rationals, Reals, and Complex Numbers. January 19, 2023 Joseph E. Johnson, PhD ; Department of Physics and Astronomy, University of South Carolina 49
B: Linear Vector Space 1. A Linear Vector Space is a set whose elements, called vectors |a> 1. may be added together |a> + |b> and 2. multiplied by numbers called scalars as 3.5*|a>. 3. Scalars are often real numbers, but can be complex numbers or, more generally, elements of any field. 4. Example: 3.5* |a> + 8.1*|b> = |c> January 19, 2023 Joseph E. Johnson, PhD ; Department of Physics and Astronomy, University of South Carolina 50





")
















 dXdX")
 Diagonal Representation:")










:")