ARM and DSP Communication Methods
The various communication methods between ARM and DSP processors, including the use of common flags, Navigator, QMSS, IPC, advantages, disadvantages, and a detailed communication example procedure. Understand the basics, implementation ease, core utilization, and latency aspects associated with each method.

Download Presentation

Please find below an Image/Link to download the presentation.
The content on the website is provided AS IS for your information and personal use only. It may not be sold, licensed, or shared on other websites without obtaining consent from the author.If you encounter any issues during the download, it is possible that the publisher has removed the file from their server.
You are allowed to download the files provided on this website for personal or commercial use, subject to the condition that they are used lawfully. All files are the property of their respective owners.
The content on the website is provided AS IS for your information and personal use only. It may not be sold, licensed, or shared on other websites without obtaining consent from the author.
E N D
Presentation Transcript
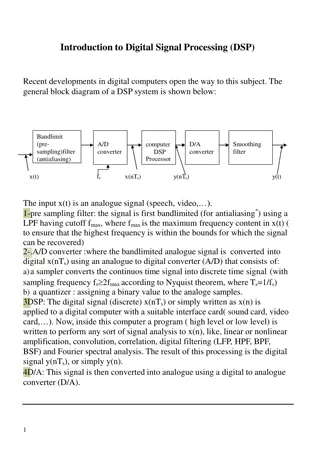
Communication Between ARM and DSP Vincent Han Mar, 2014 TI Information Selective Disclosure TI Information Selective Disclosure 1
Agenda ARM and DSP Communication Basics Run ARM & DSP Communication Example TI Information Selective Disclosure 2
Ways for ARM and DSP Communication Use common flags for communication Set some flags or signs as the public interface Communicates depends on flags/signs value change Use Navigator for communication Descriptors carry messages/values to be passed Use QMSS to pass descriptors between different queues Cores push/pop related queues to send/receive message descriptors Use IPC for communication Initialize the interrupt sub-system Set source and trigger the dedicated IPCGR register Related core received interrupt and react TI Information Selective Disclosure 3
Advantage and Disadvantage Analysis Use common flags for communication A: Easiest way to implement communication, no extra IP usage D: Spin lock implement by SW, need maintain Cache if used D: Core will be occupied when posting/pending flags Use Navigator for communication A: Message sending/receiving by HW D: Need to initialize Navigator HW, need maintain Cache if used D: Core will be occupied when posting/pending descriptors if no interrupt used Use IPC for communication A: Latency is short due to use interrupt directly A: No Core occupation before trigger/response IPC D: Need to initialize interrupt controller HW, need maintain Cache if used TI Information Selective Disclosure 4
Agenda ARM and DSP Communication Basics Run ARM & DSP Communication Example TI Information Selective Disclosure 5
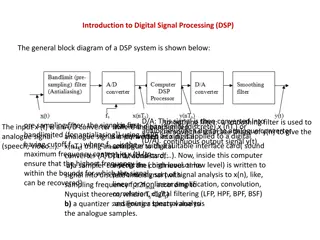
ARM & DSP Communication Example Procedure DSP Core0 ARM Core0 Basic System Hardware Initialization Run Wait for ARM Core0 interrupt ARM Core0 trigger IPC to DSP Core0 Run IPC DSP Core0 received IPC from ARM Core0 ARM Core0 pending IPC response from DSP Core0 DSP Core0 reply IPC back to ARM Core0 IPC ARM Core0 received IPC response from DSP Core0 While (1); While (1); TI Information Selective Disclosure 6
Run ARM & DSP Communication Example 1) Create TCI6638 EVM CCXML file with loading attached GEL file on DSP Core0 2) Launch the debug session with this CCXML configuration file 3) Connect and load the DSP executable on DSP Core0 4) Connect and Load the ARM executable on ARM Core0 5) Run the DSP executable first then run the ARM executable For more information, please refer operation guide on deyisupport: http://www.deyisupport.com/ TI Information Selective Disclosure 7
Thank You! TI Information Selective Disclosure TI Information Selective Disclosure