AI Search Algorithms: BFS and DFS Pseudo-code Iterative Version


Warm-up as you walk in
Write the pseudo code for breadth first search and depth first search
Iterative version, not recursive
class TreeNode
TreeNode[] children()
boolean isGoal()
BFS(TreeNode start)…
DFS(TreeNode start)…

Announcements
If you are not on Piazza, Gradescope, and Canvas
E-mail me: pvirtue@cmu.edu
No class next Mon 1/21, MLK Holiday
Recitation starting this Fri 3pm, GHC 4401 (recommended)
Bring laptop if you can (not required)
Start P0 before recitation to make sure Python 3.6 is working for
you!
Reminder to be respectful of quiet areas in campus buildings
Announcements
Assignments:
HW1 (online)
Released
at 4:30 pm today
Due Tue 1/22, 10 pm
P0: Python & Autograder Tutorial
Required, but worth zero points
Due Thu 1/24, 10 pm
No pairs, submit individually
Remaining programming assignments may be done in pairs
AI: Representation and Problem Solving
Agents and Search
Instructors: Pat Virtue & Stephanie Rosenthal
Slide credits: CMU AI, http://ai.berkeley.edu
Today
Agents and Environment
Search Problems
Uninformed Search Methods
Depth-First Search
Breadth-First Search
Uniform-Cost Search
Rationality, contd.
What is rati
onal depends on:
Performance measure
Agent’s prior knowledge of environment
Actions available to agent
Percept sequence to date
Being rati
onal means
maximizing your expected utility
Rational Agents
Are rational agents
omniscient
?
No – they are limited by the available percepts
Are rational agents
clairvoyant
?
No – they may lack knowledge of the environment dynamics
Do rational agents
explore
and
learn
?
Yes – in unknown environments these are essential
So rational agents are not necessarily successful, but they are
autonomous
(i.e., transcend initial program)
Task Environment - PEAS
Performance measure
-1 per step; +10 food; +500 win; -500 die;
+200 hit scared ghost
Environment
Pacman dynamics (incl ghost behavior)
Actuators
North, South, East, West, (Stop)
Sensors
Entire state is visible
PEAS: Automated Taxi
Performance measure
Income, happy customer, vehicle costs, fines,
insurance premiums
Environment
US streets, other drivers, customers
Actuators
Steering, brake, gas, display/speaker
Sensors
Camera, radar, accelerometer, engine sensors,
microphone
Image: http://nypost.com/2014/06/21/how-google-might-put-taxi-drivers-out-of-business/
Environment Types
Reflex Agents
Reflex agents:
Choose action based on current percept
(and maybe memory)
May have memory or a model of the
world’s current state
Do not consider the future consequences of
their actions
Consider how the world IS
Can a reflex agent be rational?
[Demo: reflex optimal (L2D1)]
[Demo: reflex optimal (L2D2)]
Demo Reflex Agent
[Demo: reflex optimal (L2D1)]
[Demo: reflex optimal (L2D2)]
Agents that Plan Ahead
Planning agents:
Decisions based on
predicted consequences
of actions
Must have a
transition model
: how the world evolves
in response to actions
Must formulate a goal
Consider how the world WOULD BE
Spectrum of deliberativeness:
Generate complete, optimal plan offline, then execute
Generate a simple, greedy plan, start executing, replan
when something goes wrong
Search Problems
Search Problems
A
search
problem
consists of:
A state space
For each state, a set
Actions(s) of allowable actions
A transition model Result(s,a)
A step cost function c(s,a,s’)
A start state and a goal test
A
solution
is a sequence of actions (a plan) which transforms
the start state to a goal state
Search Problems Are Models
Example: Travelling in Romania
State space:
Cities
Actions:
Go to adjacent city
Transition model
Result(A, Go(B)) = B
Step cost
Distance along road link
Start state:
Arad
Goal test:
Is state == Bucharest?
Solution?
What’s in a State Space?
•
Problem: Pathing
•
State representation: (x,y) location
•
Actions: NSEW
•
Transition model: update location
•
Goal test: is (x,y)=END
•
Problem: Eat-All-Dots
•
State representation: {(x,y), dot booleans}•
Actions: NSEW
•
Transition model: update location and
possibly a dot boolean
•
Goal test: dots all false
The
real world state
includes every last detail of the environment
A
search state
abstracts away details not needed to solve the problem
State Space Sizes?
World state:
Agent positions: 120
Food count: 30
Ghost positions: 12
Agent facing: NSEW
How many
World states?
120x(2
30
)x(12
2
)x4
States for pathing?
120
States for eat-all-dots?
120x(2
30
)
Safe Passage
Problem: eat all dots while keeping the ghosts perma-scared
What does the state representation have to specify?
(agent position, dot booleans, power pellet booleans, remaining scared time)
State Space Graphs and Search Trees
State Space Graphs
State space graph: A mathematical
representation of a search problem
Nodes are (abstracted) world configurations
Arcs represent transitions resulting from actions
The goal test is a set of goal nodes (maybe only one)
In a state space graph, each state occurs only
once!
We can rarely build this full graph in memory (it’s
too big), but it’s a useful idea
More Examples
More Examples
State Space Graphs vs. Search Trees
S
G
b
a
Consider this 4-state graph:
Important: Lots of repeated structure in the search tree!
How big is its search tree (from S)?
∞
Tree Search vs Graph Search
function
TREE_SEARCH
(
problem
)
returns
a solution, or failure
initialize the
frontier
as a specific work list (stack, queue, priority queue)
add initial state of
problem
to
frontier
loop do
if
the
frontier
is empty
then
return
failure
choose a
node
and remove it from the
frontier
if
the
node
contains a goal state
then
return
the corresponding solution
for each resulting
child
from node
add
child
to the
frontier
function
GRAPH_SEARCH
(
problem
)
returns
a solution, or failure
initialize the
explored set
to be empty
initialize the
frontier
as a specific work list (stack, queue, priority queue)
add initial state of
problem
to
frontier
loop do
if
the
frontier
is empty
then
return
failure
choose a
node
and remove it from the
frontier
if
the
node
contains a goal state
then
return
the corresponding solution
add the
node
state to the
explored set
for each resulting
child
from node
if the
child
state is not already in the
frontier
or
explored set
then
add
child
to the
frontier
Piazza Poll
What is the relationship between these sets of states
after each loop iteration in
GRAPH_SEARCH
?
(Loop invariants!!!)
Piazza Poll
function
GRAPH-SEARCH
(
problem
)
returns
a solution, or failure
initialize the
explored set
to be empty
initialize the
frontier
as a specific work list (stack, queue, priority queue)
add initial state of
problem
to
frontier
loop do
if
the
frontier
is empty
then
return
failure
choose a
node
and remove it from the
frontier
if
the
node
contains a goal state
then
return
the corresponding solution
add the
node
state to the
explored set
for each resulting
child
from node
if the
child
state is not already in the
frontier
or
explored set
then
add
child
to the
frontier
Graph Search
This graph search algorithm overlays a tree on a graph
The
frontier
states separate the
explored
states from
never seen
states
Images: AIMA, Figure 3.8, 3.9
BFS vs DFS
Piazza Poll
Is the following demo using BFS or DFS
[Demo: dfs/bfs maze water (L2D6)]
A Note on Implementation
Nodes have
state
,
parent
,
action
,
path-cost
A child of
node
by action
a
has
state
=
result
(
node
.
state
,
a
)
parent
=
node
action
=
a
path-cost
=
node
.
path_cost
+
step_cost
(
node
.
state
,
a
,
self.
state
)
Extract solution by tracing back parent pointers, collecting actions
Walk-through DFS Graph Search
BFS vs DFS
When will BFS outperform DFS?
When will DFS outperform BFS?
Search Algorithm Properties
Search Algorithm Properties
Complete: Guaranteed to find a solution if one exists?
Optimal: Guaranteed to find the least cost path?
Time complexity?
Space complexity?
Cartoon of search tree:
b is the branching factor
m is the maximum depth
solutions at various depths
Number of nodes in entire tree?
1 + b + b
2
+ …. b
m
= O(b
m
)
…
b
1 node
b nodes
b
2
nodes
b
m
nodes
m tiers
Search Algorithm Properties
Complete: Guaranteed to find a solution if one exists?
Optimal: Guaranteed to find the least cost path?
Time complexity?
Space complexity?
Cartoon of search tree:
b is the branching factor
m is the maximum depth
solutions at various depths
Number of nodes in entire tree?
1 + b + b
2
+ …. b
m
= O(b
m
)
…
b
1 node
b nodes
b
2
nodes
b
m
nodes
m tiers
Are these the properties for BFS or DFS?
Takes O(b
m
) time
Uses O(bm) space on frontier
Complete with graph search
Not optimal unless all goals are in the same level
(and the same step cost everywhere)
Piazza Poll
Depth-First Search (DFS) Properties
What nodes does DFS expand?
Some left prefix of the tree.
Could process the whole tree!
If m is finite, takes time O(b
m
)
How much space does the frontier take?
Only has siblings on path to root, so O(bm)
Is it complete?
m could be infinite, so only if we prevent cycles
(graph search)
Is it optimal?
No, it finds the “leftmost” solution, regardless of
depth or cost
Breadth-First Search (BFS) Properties
What nodes does BFS expand?
Processes all nodes above shallowest solution
Let depth of shallowest solution be s
Search takes time O(b
s
)
How much space does the frontier take?
Has roughly the last tier, so O(b
s
)
Is it complete?
s must be finite if a solution exists, so yes!
Is it optimal?
Only if costs are all the same (more on costs later)
…
b
1 node
b nodes
b
2
nodes
b
m
nodes
s tiers
b
s
nodes
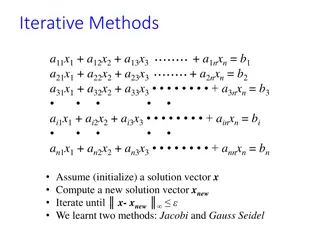
Iterative Deepening
…
b
Idea: get DFS’s space advantage with BFS’s
time / shallow-solution advantages
Run a DFS with depth limit 1. If no solution…
Run a DFS with depth limit 2. If no solution…
Run a DFS with depth limit 3. …..
Isn’t that wastefully redundant?
Generally most work happens in the lowest level
searched, so not so bad!
Finding a Least-Cost Path
Depth-First (Tree) Search
r
Strategy: expand a
deepest node first
Implementation:
Frontier is a LIFO stack
Breadth-First (Tree) Search
Strategy: expand a
shallowest node first
Implementation:
Frontier is a FIFO queue
Uniform Cost (Tree) Search
Strategy: expand a cheapest
node first:
Frontier is a priority queue
(priority: cumulative cost
)
3
9
1
16
4
11
5
7
13
8
10
11
17
11
0
6
3
9
1
1
2
8
8
2
15
1
2
Cost
contours
2
Uniform Cost Search
function
GRAPH_SEARCH
(
problem
)
returns
a solution, or failure
initialize the
explored set
to be empty
initialize the
frontier
as a specific work list (stack, queue, priority queue)
add initial state of
problem
to
frontier
loop do
if
the
frontier
is empty
then
return
failure
choose a
node
and remove it from the
frontier
if
the
node
contains a goal state
then
return
the corresponding solution
add the
node
state to the
explored set
for each resulting
child
from node
if the
child
state is not already in the
frontier
or
explored set
then
add
child
to the
frontier
function
UNIFORM-COST-SEARCH
(
problem
)
returns
a solution, or failure
initialize the
explored set
to be empty
initialize the
frontier
as a
priority queue using node path_cost as the priority
add initial state of
problem
to
frontier
with path_cost = 0
loop do
if
the
frontier
is empty
then
return
failure
choose a
node
and remove it from the
frontier
if
the
node
contains a goal state
then
return
the corresponding solution
add the
node
state to the
explored set
for each resulting
child
from node
if the
child
state is not already in the
frontier
or
explored set
then
add
child
to the
frontier
else if the
child
is already in the
frontier
with higher path_cost
then
replace that
frontier
node with
child
Walk-through UCS
…
Uniform Cost Search (UCS) Properties
What nodes does UCS expand?
Processes all nodes with cost less than cheapest solution!
If that solution costs
C*
and arcs cost at least
,
then the
“effective depth” is roughly
C*/
Takes time O(b
C*/
) (exponential in effective depth)
How much space does the frontier take?
Has roughly the last tier, so O(b
C*/
)
Is it complete?
Assuming best solution has a finite cost and minimum arc
cost is positive, yes!
Is it optimal?
Yes! (Proof next lecture via A*)
b
C*/
“tiers”
c
3
c
2
c
1
Uniform Cost Issues
Remember:
UCS explores increasing cost contours
The good:
UCS is complete and optimal!
The bad:
Explores options in every “direction”
No information about goal location
We’ll fix that soon!
Start
Goal
Explore the iterative versions of Breadth First Search (BFS) and Depth First Search (DFS) with pseudo-code examples implemented for class TreeNode. Understand the concept of TreeNode, children() function, isGoal() method, and apply BFS and DFS starting from TreeNode start.

Download Presentation

Please find below an Image/Link to download the presentation.
The content on the website is provided AS IS for your information and personal use only. It may not be sold, licensed, or shared on other websites without obtaining consent from the author. Download presentation by click this link. If you encounter any issues during the download, it is possible that the publisher has removed the file from their server.
E N D
Presentation Transcript
Warm-up as you walk in Write the pseudo code for breadth first search and depth first search Iterative version, not recursive class TreeNode TreeNode[] children() boolean isGoal() BFS(TreeNode start) DFS(TreeNode start)
Announcements If you are not on Piazza, Gradescope, and Canvas E-mail me: pvirtue@cmu.edu No class next Mon 1/21, MLK Holiday Recitation starting this Fri 3pm, GHC 4401 (recommended) Bring laptop if you can (not required) Start P0 before recitation to make sure Python 3.6 is working for you! Reminder to be respectful of quiet areas in campus buildings
Announcements Assignments: HW1 (online) Released at 4:30 pm today Due Tue 1/22, 10 pm P0: Python & Autograder Tutorial Required, but worth zero points Due Thu 1/24, 10 pm No pairs, submit individually Remaining programming assignments may be done in pairs
AI: Representation and Problem Solving Agents and Search Instructors: Pat Virtue & Stephanie Rosenthal Slide credits: CMU AI, http://ai.berkeley.edu
Today Agents and Environment Search Problems Uninformed Search Methods Depth-First Search Breadth-First Search Uniform-Cost Search
Rationality, contd. What is rational depends on: Performance measure Agent s prior knowledge of environment Actions available to agent Percept sequence to date Being rational means maximizing your expected utility
Rational Agents Are rational agents omniscient? No they are limited by the available percepts Are rational agents clairvoyant? No they may lack knowledge of the environment dynamics Do rational agents explore and learn? Yes in unknown environments these are essential So rational agents are not necessarily successful, but they are autonomous (i.e., transcend initial program)
Task Environment - PEAS Performance measure -1 per step; +10 food; +500 win; -500 die; +200 hit scared ghost Environment Pacman dynamics (incl ghost behavior) Actuators North, South, East, West, (Stop) Sensors Entire state is visible
PEAS: Automated Taxi Performance measure Income, happy customer, vehicle costs, fines, insurance premiums Environment US streets, other drivers, customers Actuators Steering, brake, gas, display/speaker Sensors Camera, radar, accelerometer, engine sensors, microphone Image: http://nypost.com/2014/06/21/how-google-might-put-taxi-drivers-out-of-business/
Environment Types Pacman Taxi Fully or partially observable Single agent or multi-agent Deterministic or stochastic Static or dynamic Discrete or continuous
Reflex Agents Reflex agents: Choose action based on current percept (and maybe memory) May have memory or a model of the world s current state Do not consider the future consequences of their actions Consider how the world IS Can a reflex agent be rational? [Demo: reflex optimal (L2D1)] [Demo: reflex optimal (L2D2)]
Demo Reflex Agent [Demo: reflex optimal (L2D1)] [Demo: reflex optimal (L2D2)]
Agents that Plan Ahead Planning agents: Decisions based on predicted consequences of actions Must have a transition model: how the world evolves in response to actions Must formulate a goal Consider how the world WOULD BE Spectrum of deliberativeness: Generate complete, optimal plan offline, then execute Generate a simple, greedy plan, start executing, replan when something goes wrong
Search Problems A search problem consists of: A state space For each state, a set Actions(s) of allowable actions {N, E} 1 N A transition model Result(s,a) E 1 A step cost function c(s,a,s ) A start state and a goal test A solution is a sequence of actions (a plan) which transforms the start state to a goal state
Example: Travelling in Romania State space: Cities Actions: Go to adjacent city Transition model Result(A, Go(B)) = B Step cost Distance along road link Start state: Arad Goal test: Is state == Bucharest? Solution? Oradea 71 Neamt 87 Zerind 151 75 Iasi Arad 140 92 Sibiu Fagaras 99 118 Vaslui 80 Rimnicu Vilcea Timisoara 142 211 111 Pitesti Lugoj 97 70 98 Hirsova 85 146 Mehadia 101 Urziceni 86 75 138 Bucharest 120 Drobeta 90 Eforie Craiova Giurgiu
Whats in a State Space? The real world state includes every last detail of the environment A search state abstracts away details not needed to solve the problem Problem: Pathing State representation: (x,y) location Actions: NSEW Transition model: update location Goal test: is (x,y)=END Problem: Eat-All-Dots State representation: {(x,y), dot booleans} Actions: NSEW Transition model: update location and possibly a dot boolean Goal test: dots all false
State Space Sizes? World state: Agent positions: 120 Food count: 30 Ghost positions: 12 Agent facing: NSEW How many World states? 120x(230)x(122)x4 States for pathing? 120 States for eat-all-dots? 120x(230)
Safe Passage Problem: eat all dots while keeping the ghosts perma-scared What does the state representation have to specify? (agent position, dot booleans, power pellet booleans, remaining scared time)
State Space Graphs State space graph: A mathematical representation of a search problem Nodes are (abstracted) world configurations Arcs represent transitions resulting from actions The goal test is a set of goal nodes (maybe only one) In a state space graph, each state occurs only once! We can rarely build this full graph in memory (it s too big), but it s a useful idea
More Examples Oradea 71 Neamt 87 Zerind 151 75 Iasi Arad 140 92 Sibiu Fagaras 99 118 Vaslui 80 Rimnicu Vilcea Timisoara 142 211 111 Pitesti Lugoj 97 70 98 Hirsova 85 146 Mehadia 101 Urziceni 86 75 138 Bucharest 120 Drobeta 90 Eforie Craiova Giurgiu
More Examples R L R L S S R R L R L R L L S S S S R L R L S S
State Space Graphs vs. Search Trees How big is its search tree (from S)? Consider this 4-state graph: S a b a G S G b G a b G a b G Important: Lots of repeated structure in the search tree!
functionTREE_SEARCH(problem) returnsa solution, or failure initialize the frontier as a specific work list (stack, queue, priority queue) add initial state of problem to frontier loop do ifthe frontier is empty then returnfailure choose a node and remove it from the frontier ifthe node contains a goal state then returnthe corresponding solution for each resulting child from node add child to the frontier
functionGRAPH_SEARCH(problem) returnsa solution, or failure initialize the explored set to be empty initialize the frontier as a specific work list (stack, queue, priority queue) add initial state of problem to frontier loop do ifthe frontier is empty then returnfailure choose a node and remove it from the frontier ifthe node contains a goal state then returnthe corresponding solution add the node state to the explored set for each resulting child from node if the child state is not already in the frontier or explored set then add child to the frontier
Piazza Poll What is the relationship between these sets of states after each loop iteration in GRAPH_SEARCH? (Loop invariants!!!) A B C Explored Never Seen Explored Never Seen Explored Never Seen Frontier Frontier Frontier
Piazza Poll functionGRAPH-SEARCH(problem) returnsa solution, or failure initialize the explored set to be empty initialize the frontier as a specific work list (stack, queue, priority queue) add initial state of problem to frontier loop do ifthe frontier is empty then returnfailure choose a node and remove it from the frontier ifthe node contains a goal state then returnthe corresponding solution add the node state to the explored set for each resulting child from node if the child state is not already in the frontier or explored set then add child to the frontier
Graph Search This graph search algorithm overlays a tree on a graph The frontier states separate the explored states from never seen states Images: AIMA, Figure 3.8, 3.9
Piazza Poll Is the following demo using BFS or DFS [Demo: dfs/bfs maze water (L2D6)]
A Note on Implementation Nodes have state, parent, action, path-cost PARENT A child of node by action a has state = result(node.state,a) parent = node action = a path-cost = node.path_cost + step_cost(node.state, a, self.state) Node ACTION = Right PATH-COST = 6 5 5 4 4 6 6 1 1 8 8 STATE 7 7 3 3 2 2 Extract solution by tracing back parent pointers, collecting actions
G Walk-through DFS Graph Search a c b e d f S h p r q
BFS vs DFS When will BFS outperform DFS? When will DFS outperform BFS?
Search Algorithm Properties Complete: Guaranteed to find a solution if one exists? Optimal: Guaranteed to find the least cost path? Time complexity? Space complexity? 1 node b nodes b2 nodes b Cartoon of search tree: b is the branching factor m is the maximum depth solutions at various depths m tiers bm nodes Number of nodes in entire tree? 1 + b + b2+ . bm = O(bm)
Search Algorithm Properties Complete: Guaranteed to find a solution if one exists? Optimal: Guaranteed to find the least cost path? Time complexity? Space complexity? 1 node b nodes b2 nodes b Cartoon of search tree: b is the branching factor m is the maximum depth solutions at various depths m tiers bm nodes Number of nodes in entire tree? 1 + b + b2+ . bm = O(bm)
Piazza Poll 1 node b nodes b2 nodes b Are these the properties for BFS or DFS? m tiers Takes O(bm) time Uses O(bm) space on frontier bm nodes Complete with graph search Not optimal unless all goals are in the same level (and the same step cost everywhere)
Depth-First Search (DFS) Properties What nodes does DFS expand? Some left prefix of the tree. Could process the whole tree! If m is finite, takes time O(bm) 1 node b nodes b2 nodes b How much space does the frontier take? Only has siblings on path to root, so O(bm) m tiers Is it complete? m could be infinite, so only if we prevent cycles (graph search) bm nodes Is it optimal? No, it finds the leftmost solution, regardless of depth or cost
Breadth-First Search (BFS) Properties What nodes does BFS expand? Processes all nodes above shallowest solution Let depth of shallowest solution be s Search takes time O(bs) 1 node b nodes b2 nodes b s tiers How much space does the frontier take? Has roughly the last tier, so O(bs) bs nodes Is it complete? s must be finite if a solution exists, so yes! bm nodes Is it optimal? Only if costs are all the same (more on costs later)
Iterative Deepening Idea: get DFS s space advantage with BFS s time / shallow-solution advantages Run a DFS with depth limit 1. If no solution Run a DFS with depth limit 2. If no solution Run a DFS with depth limit 3. .. b Isn t that wastefully redundant? Generally most work happens in the lowest level searched, so not so bad!
Finding a Least-Cost Path GOAL a 2 2 c b 3 2 1 8 2 e d 3 f 9 8 2 START h 4 2 1 4 p r 15 q
Depth-First (Tree) Search G Strategy: expand a deepest node first a a c c b b e e Implementation: Frontier is a LIFO stack d d f f S h h p p r r q q S e p d q e h r b c h r p q f a a q c G p q f a q c G a
Breadth-First (Tree) Search G a Strategy: expand a shallowest node first c b e Implementation: Frontier is a FIFO queue d f S h p r q S e p d Search q e h r b c Tiers h r p q f a a q c G p q f a q c G a
Uniform Cost (Tree) Search 2 G a Strategy: expand a cheapest node first: c b 8 1 2 2 e 3 d f 2 9 Frontier is a priority queue (priority: cumulative cost) 8 S h 1 1 p r q 15 0 S 1 9 e p 3 d 16 q 11 5 17 e h r 4 b c 11 Cost contours 7 6 13 h r p q f a a q c 8 G p q f a q c 11 10 G a
functionGRAPH_SEARCH(problem) returnsa solution, or failure initialize the explored set to be empty initialize the frontier as a specific work list (stack, queue, priority queue) add initial state of problem to frontier loop do ifthe frontier is empty then returnfailure choose a node and remove it from the frontier ifthe node contains a goal state then returnthe corresponding solution add the node state to the explored set for each resulting child from node if the child state is not already in the frontier or explored set then add child to the frontier
functionUNIFORM-COST-SEARCH(problem) returnsa solution, or failure initialize the explored set to be empty initialize the frontier as a priority queue using node path_cost as the priority add initial state of problem to frontier with path_cost = 0 loop do ifthe frontier is empty then returnfailure choose a node and remove it from the frontier ifthe node contains a goal state then returnthe corresponding solution add the node state to the explored set for each resulting child from node if the child state is not already in the frontier or explored set then add child to the frontier else if the child is already in the frontier with higher path_cost then replace that frontier node with child


























 returnsa solution, or failure")
 returnsa solution, or failure")












 Properties")
 Properties")


 Search")
 Search")
 Search")

 returnsa solution, or failure")
 returnsa solution, or")