Classical Mechanics at Neotech Institute of Applied Science and Research, Virod

Classical Mechanics
B.Sc-Sem-V
Neotech Institute of Applied Science and Research
At.Virod,Vadodara
Motion of Rigid Body
Chapter-1
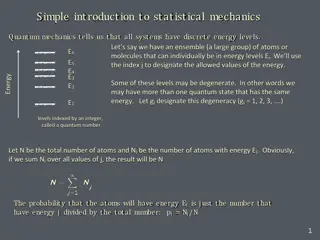
Introduction
►
The complete motion for a system is not given to us outright, but rather is
encoded in a set of differential equations, called the equations of motion.
Angular momentum
►
it is about the axis is measure of an object rotational motion about this axis. For
rotational about symmetry axis of an object, the angular momentum L is defined
as “ the product of an object’s moment of inertia I times its angular velocity 𝜔
about the axis.
►
L = I. 𝜔
Euler's theorem
The Inertia tensor
The inertia tensor
The diagonal elements of
Iα.β are called the
moments of inertia, while
the off-diagonal elements
are called the products of
inertia.
Euler's equations of motion
Motion of Symmetric top
Euler’s Angles
►
Euler’s angles are the mean of the spatial orientation of any frame of the
space as composition of rotation from a reference frame. The fixed system is
denoted by (x,y,z) and rotating system is denoted by (X,Y,Z)
►
The xy and XY coordinate of space is known as line of nodes N.
►
α is the angles between the x-axis and line of nodes.
►
β is the angles between z-axis and the Z-axis.
►
γ is the angles between the line of nodes and the X-axis.
▪
When ever using Euler's angles the
order and the axes about which
the rotation are applied should be
supplied.
▪
Euler’s angles are used to orient
of two such coordinates system.
▪
Angle range :
▪
α and γ have to 2π radian range.
▪
Β ranges from to π radians.
they are same even though 3D
rotation. This corresponds to xy and
XY planes are identical so rotation
of α+γ about the z-axis
Nutational motion
►
Nutation means rocking or nodding motion in the axis of
rotation of a symmetry object.
►
That symmetry object may be a planet,
bullet in flight,etc. it can be defined as
change in Euler’s angles.
▪
If it is not caused by force to external body
is called nutation or Euler's nutation.
R= rotation
P=precession
N = nutation obliquity of planet
Thank you
References
1.
Wikipedia.org
2.
Slideshare.net
3.
Thorton & Marion’s classical mechanics
4.
Introduction of classical mechanics by David Morin, Cambridge
university press. ISBN 978-0-521-87622-3
Made by Dr. Maunik Jani
Delve into the world of Classical Mechanics in B.Sc Semester-V at Neotech Institute of Applied Science and Research, located in Virod, Vadodara. Explore topics such as motion of rigid bodies, angular momentum, Euler's theorem, inertia tensor, and Euler's equations of motion through a comprehensive study of differential equations.

Download Presentation

Please find below an Image/Link to download the presentation.
The content on the website is provided AS IS for your information and personal use only. It may not be sold, licensed, or shared on other websites without obtaining consent from the author. Download presentation by click this link. If you encounter any issues during the download, it is possible that the publisher has removed the file from their server.
E N D
Presentation Transcript
Classical Mechanics B.Sc-Sem-V Neotech Institute of Applied Science and Research At.Virod,Vadodara
Motion of Rigid Body Chapter-1
The complete motion for a system is not given to us outright, but rather is encoded in a set of differential equations, called the equations of motion.
it is about the axis is measure of an object rotational motion about this axis. For rotational about symmetry axis of an object, the angular momentum L is defined as the product of an object s moment of inertia I times its angular velocity ? about the axis. L = I. ?
The inertia tensor The diagonal elements of I . are called the moments of inertia, while the off-diagonal elements are called the products of inertia.
Eulers Angles Euler s angles are the mean of the spatial orientation of any frame of the space as composition of rotation from a reference frame. The fixed system is denoted by (x,y,z) and rotating system is denoted by (X,Y,Z) The xy and XY coordinate of space is known as line of nodes N. is the angles between the x-axis and line of nodes. is the angles between z-axis and the Z-axis. is the angles between the line of nodes and the X-axis.
When ever using Euler's angles the order and the axes about which the rotation are applied should be supplied. Euler s angles are used to orient of two such coordinates system. Angle range : and have to 2 radian range. ranges from to radians. they are same even though 3D rotation. This corresponds to xy and XY planes are identical so rotation of + about the z-axis
Nutational motion Nutation means rocking or nodding motion in the axis of rotation of a symmetry object. That symmetry object may be a planet, bullet in flight,etc. it can be defined as change in Euler s angles. If it is not caused by force to external body is called nutation or Euler's nutation. R= rotation P=precession N = nutation obliquity of planet
Thank you Made by Dr. Maunik Jani References Wikipedia.org 1. Slideshare.net 2. Thorton & Marion s classical mechanics 3. Introduction of classical mechanics by David Morin, Cambridge university press. ISBN 978-0-521-87622-3 4.