Understanding Threads and Task Scheduling in Operating Systems
 undefined
undefined

W
e
l
c
o
m
e
t
o
C
S
3
4
5
O
p
e
r
a
t
i
n
g
S
y
s
t
e
m
s
C
h
a
p
t
e
r
4
–
T
h
r
e
a
d
s
(
0
9
)



T
i
p
#
9
:
S
t
a
n
d
a
r
d
I
n
t
e
g
e
r
t
y
p
e
d
e
f
s
■
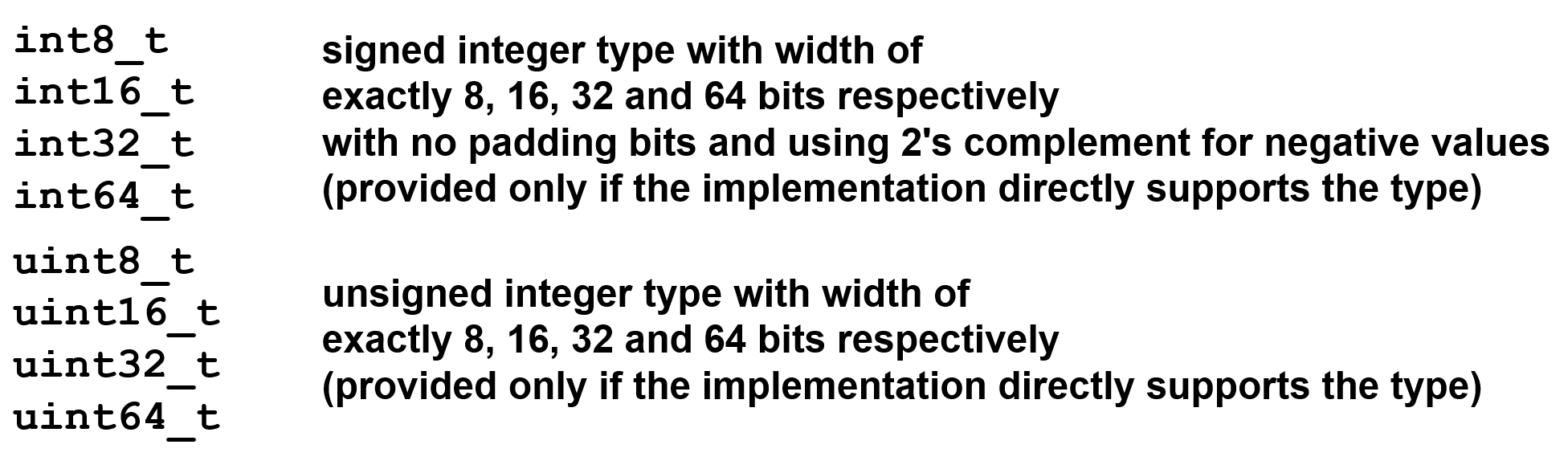
The actual size of integer types varies by implementation.
■
T
h
e
s
t
a
n
d
a
r
d
o
n
l
y
r
e
q
u
i
r
e
s
s
i
z
e
r
e
l
a
t
i
o
n
s
b
e
t
w
e
e
n
t
h
e
d
a
t
a
t
y
p
e
s
a
n
d
m
i
n
i
m
u
m
s
i
z
e
s
f
o
r
e
a
c
h
d
a
t
a
t
y
p
e
,
s
u
c
h
t
h
a
t
a
l
o
n
g
l
o
n
g
i
s
n
o
t
s
m
a
l
l
e
r
t
h
a
n
l
o
n
g
,
w
h
i
c
h
i
s
n
o
t
s
m
a
l
l
e
r
t
h
a
n
i
n
t
,
w
h
i
c
h
i
s
n
o
t
s
m
a
l
l
e
r
t
h
a
n
s
h
o
r
t
.
■
A
s
c
h
a
r
'
s
s
i
z
e
i
s
a
l
w
a
y
s
t
h
e
m
i
n
i
m
u
m
s
u
p
p
o
r
t
e
d
d
a
t
a
t
y
p
e
,
n
o
o
t
h
e
r
d
a
t
a
t
y
p
e
s
(
e
x
c
e
p
t
b
i
t
-
f
i
e
l
d
s
)
c
a
n
b
e
s
m
a
l
l
e
r
.
■
Starting with C99, the following pre-processor macros are defined in the
header file
<stdint.h>:
Threads (9)
2
 undefined
undefined


P
R
O
J
E
C
T
2
:
T
A
S
K
I
N
G

3
P
r
o
j
e
c
t
2
:
M
u
l
t
i
t
a
s
k
i
n
g
■
Contemporary operating systems are built around the concept of processes
or tasks.
■
A task is an execution stream in the context of a particular task state.
■
Organizing system activities around tasks has proved to be a useful way of
separating out different activities into coherent units.
■
To effectively utilize hardware resources, an operating system must
interleave the execution of multiple tasks and still provide reasonable
response times.
■
These tasks may or may not be related, should not directly affect the state of
another task, but usually always need to share resources in a protected,
prioritized, and equitable manner.
Threads (9)
4
P
r
o
j
e
c
t
2
:
M
u
l
t
i
t
a
s
k
i
n
g
■
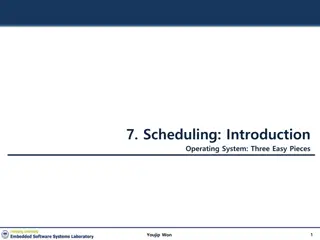
Add a five-state task scheduler to your operating system capable of
executing up to 128 tasks in a preemptive, prioritized, round-robin manner.
■
At any point in time, a task will be newly created, ready to run, running,
blocked waiting for some event to occur, or exiting. A five-state task
scheduler is illustrated as follows:
Threads (9)
5
S
t
e
p
1
:
P
r
i
o
r
i
t
y
Q
u
e
u
e
■
Create a priority queue
■
typedef int16_t TID;
// task ID
typedef int16_t Priority;
// task priority
typedef uint16_t* PQueue;
// priority queue
Write queue functions to add/delete elements
TID enQ(PQueue q, TID tid, Priority p);
TID deQ(PQueue q, TID tid);
q
->
(# | pr1/tid1 | pr2/tid2 | …)
tid
>=0
find and delete tid from q
-1
return highest priority tid
TID
tid
(if found and deleted from q)
-1
(if q empty or task not found)
T
H
O
R
O
U
G
H
L
Y
T
E
S
T
B
E
F
O
R
E
P
R
O
C
E
E
D
I
N
G
!
Threads (9)
6
P
r
i
o
r
i
t
y
Q
u
e
u
e
t
y
p
e
d
e
f
s
t
r
u
c
t
{i
n
t
1
6
_
t
s
i
z
e
;
s
t
r
u
c
t
{u
i
n
t
8
_
t
t
i
d
;
u
i
n
t
8
_
t
p
r
i
o
r
i
t
y
;
}
p
q
[
M
A
X
_
T
A
S
K
S
]
;
}
P
Q
;
t
y
p
e
d
e
f
u
i
n
t
1
6
_
t
*
P
Q
;
P
Q
*
r
q
=
(
P
Q
*
)
m
a
l
l
o
c
(
s
i
z
e
o
f
(
P
Q
)
)
;
r
q
-
>
s
i
z
e
=
1
;
r
q
-
>
p
q
[
0
]
.
t
i
d
=
t
i
d
;
r
q
-
>
p
q
[
0
]
.
p
r
i
o
r
i
t
y
=
p
r
i
o
r
i
t
y
;
r
q
-
>
p
q
[
0
]
=
r
q
-
>
p
q
[
1
]
;
P
Q
r
q
=
(
P
Q
)
m
a
l
l
o
c
(
(
M
A
X
_
T
A
S
K
S
+
1
)
*
s
i
z
e
o
f
(
u
i
n
t
1
6
_
t
)
)
;
r
q
[
0
]
=
1
;
r
q
[
1
]
=
(
p
r
i
o
r
i
t
y
<
<
8
)
+
t
i
d
;
r
q
[
0
]
=
r
q
[
1
]
;
Threads (9)
7
S
t
e
p
2
:
S
c
h
e
d
u
l
e
w
/
R
e
a
d
y
Q
u
e
u
e
■
Create a ready priority queue
■
typedef uint16_t* PQ;
// priority queue
PQueue rq;
// ready queue
rq = (int*)malloc(MAX_TASKS * sizeof(int));
rq[0] = 0;
// init ready queue
P
2
-
T
a
s
k
i
n
g
Add new task to ready queue in createTask
enQ(rq, tid, tcb[tid].priority);
NOTE: priority = tcb[tid].priority
Threads (9)
8
2
-
S
t
a
t
e
S
c
h
e
d
u
l
e
r
c
r
e
a
t
e
T
a
s
k
(
)
d
i
s
p
a
t
c
h
(
)
s
w
a
p
T
a
s
k
(
)
k
i
l
l
T
a
s
k
(
)
if ((tid = deQ(rq, -1)) >= 0)
enQ(rq, tid, tcb[tid].priority);
enQ(rq, tid, tcb[tid].priority) in createTask
Threads (9)
9
P
R
O
C
E
S
S
E
S
A
N
D
T
H
R
E
A
D
S
Chapter 4
10
10
Threads (9)
11
11
C
S
3
4
5
C
h
a
p
t
e
r
4
L
e
a
r
n
i
n
g
O
u
t
c
o
m
e
s
■
U
n
d
e
r
s
t
a
n
d
t
h
e
d
i
s
t
i
n
c
t
i
o
n
b
e
t
w
e
e
n
p
r
o
c
e
s
s
a
n
d
t
h
r
e
a
d
.
■
Describe the basic design issues for threads.
■
Explain the difference between user-level threads and kernel-level
threads.
■
Explain how threads are managed.
■
Describe the thread management facility in Windows.
■
Describe the thread management facility in Solaris.
■
Describe the thread management facility in Linux.
Threads (9)
12
12
W
h
a
t
i
s
a
C
o
m
p
u
t
e
r
P
r
o
c
e
s
s
?
■
Traditionally, a process or task is considered an instance of a
computer program that is being executed.
■
A process contains
■
Unit of allocation (resources)
■
Unit of execution (context)
■
Unit of external input (data)
■
Of the above, which are independent of the others?
■
Unit of
allocation (resources)
p
rocess
■
Unit of execution (context)
thread or lightweight process
■
Can a thread exist without a process (and vice versa)?
■
Can a process have more than one context?
■
How would switching processes compare to switching threads?
Threads (9)
13
13
P
r
o
c
e
s
s
e
s
(
H
e
a
v
y
w
e
i
g
h
t
)
■
What resources might be owned by a process?
■
Code, memory, heap
■
Tables (files, signals, semaphores, buffers, I/O,…)
■
Privileges
■
How is information shared between processes (IPC)?
■
Message Queues
■
Sockets,
■
Files
■
Shared memory,
■
Pipes
■
Signals
■
How would you describe inter-process communication?
■
Expensive: need to context switch.
■
Secure: one process cannot corrupt another process.
Threads (9)
14
14
T
h
r
e
a
d
s
(
L
i
g
h
t
w
e
i
g
h
t
)
■
What is a thread?
■
An independent program counter and stack operating within a process -
sometimes called a lightweight process (LWP)
■
Smallest unit of processing (context) that can be scheduled by an operating
system
■
What resources are owned by a thread?
■
CPU registers (PC, SR, SP, ...)
■
Stack
■
State
■
What do all process threads have in common?
■
Process resources
■
Global variables
■
How would you describe inter-thread communication?
■
Cheap: can use process memory without needing a context switch.
■
Not Secure: one thread can write to memory in use by another thread.
Threads (9)
15
15
E
x
a
m
p
l
e
s
o
f
T
h
r
e
a
d
s
/
P
r
o
c
e
s
s
e
s
1:1 (DOS)
1:N (Java)
Multi-tasking w/1:1
(UNIX)
M:N Hybrid Threading
(Windows, Solaris)
Threads (9)
16
16
C
h
a
p
t
e
r
4
L
e
a
r
n
i
n
g
O
u
t
c
o
m
e
s
■
Understand the distinction between process and thread.
■
D
e
s
c
r
i
b
e
t
h
e
b
a
s
i
c
d
e
s
i
g
n
i
s
s
u
e
s
f
o
r
t
h
r
e
a
d
s
.
■
E
x
p
l
a
i
n
t
h
e
d
i
f
f
e
r
e
n
c
e
b
e
t
w
e
e
n
u
s
e
r
-
l
e
v
e
l
t
h
r
e
a
d
s
a
n
d
k
e
r
n
e
l
-
l
e
v
e
l
t
h
r
e
a
d
s
.
■
Explain how threads are managed.
■
Describe the thread management facility in Windows.
■
Describe the thread management facility in Solaris.
■
Describe the thread management facility in Linux.
Threads (9)
17
17
M
u
l
t
i
-
t
h
r
e
a
d
i
n
g
Threads (9)
18
18
T
a
s
k
C
o
n
t
r
o
l
B
l
o
c
k
(
t
c
b
)
// task control block
typedef struct
// task control block
{char* name;
// task name
int (*task)(int,char**);
// task address
int state;
// task state (P2)
int priority;
// task priority (P2)
int argc;
// task argument count (P1)
char** argv;
// task argument pointers (P1)
int signal;
// task signals (P1)
//
void (*sigContHandler)(void);
// task mySIGCONT handler
void (*sigIntHandler)(void);
// task mySIGINT handler
//
void (*sigKillHandler)(void);
// task mySIGKILL handler
//
void (*sigTermHandler)(void);
// task mySIGTERM handler
//
void (*sigTstpHandler)(void);
// task mySIGTSTP handler
TID parent;
// task parent
int RPT;
// task root page table (P4)
int cdir;
// task directory (P6)
Semaphore *event;
// blocked task semaphore (P2)
void* stack;
// task stack (P1)
jmp_buf context;
// task context pointer (P1)
} TCB;
Threads (9)
19
19
T
y
p
e
s
o
f
T
h
r
e
a
d
s
■
A thread consists of:
■
a thread execution state (Running, Ready, etc.)
■
a context (program counter, register set.)
■
an execution stack.
■
some per-tread static storage for local variables.
■
access to the memory and resources of its process (shared with all other threads
in that process.)
■
OS resources (open files, signals, etc.)
■
Thus, all of the threads of a process share the state and resources of
the parent process (memory space and code section.)
■
There are two types of threads:
■
User-space (ULT) and
■
Kernel-space (KLT).
Threads (9)
20
20
U
s
e
r
-
L
e
v
e
l
T
h
r
e
a
d
s
■
User-level threads avoid the kernel and are managed by the
process.
■
Often this is called "cooperative multitasking" where the task defines a set of
routines that get "switched to" by manipulating the stack pointer.
■
Typically each thread "gives-up" the CPU by calling an explicit switch, sending a
signal or doing an operation that involves the switcher.
■
A timer signal can force switching.
■
User threads typically can switch faster than kernel threads [however, Linux
kernel threads' switching is actually pretty close in performance].
Threads (9)
21
21
U
s
e
r
-
L
e
v
e
l
T
h
r
e
a
d
s
■
Disadvantages.
■
User-space threads have a problem that a single thread can monopolize the
timeslice thus starving the other threads within the task.
■
Also, it has no way of taking advantage of SMPs (Symmetric MultiProcessor
systems, e.g. dual-/quad-Pentiums).
■
Lastly, when a thread becomes I/O blocked, all other threads within the task
lose the timeslice as well.
■
Solutions/work arounds.
■
Timeslice monopolization can be controlled with an external monitor that uses
its own clock tick.
■
Some SMPs can support user-space multithreading by firing up tasks on
specified CPUs then starting the threads from there [this form of SMP threading
seems tenuous, at best].
■
Some libraries solve the I/O blocking problem with special wrappers over
system calls, or the task can be written for nonblocking I/O.
Threads (9)
22
22
Advantages.
Since the clocktick will determine the switching times, a task is less likely to
hog the timeslice from the other threads within the task.
I/O blocking is not a problem.
I
f
p
r
o
p
e
r
l
y
c
o
d
e
d
,
t
h
e
p
r
o
c
e
s
s
a
u
t
o
m
a
t
i
c
a
l
l
y
c
a
n
t
a
k
e
a
d
v
a
n
t
a
g
e
o
f
S
M
P
s
a
n
d
w
i
l
l
r
u
n
i
n
c
r
e
m
e
n
t
a
l
l
y
f
a
s
t
e
r
w
i
t
h
e
a
c
h
a
d
d
e
d
C
P
U
.
K
e
r
n
e
l
-
L
e
v
e
l
T
h
r
e
a
d
s
■
KLTs often are implemented in the kernel using several tables (each
task gets a table of threads).
■
The kernel schedules each thread within the timeslice of each process.
■
There is a little more overhead with mode switching from user to kernel mode
because of loading of larger contexts, but initial performance measures indicate
a negligible increase in time.
Threads (9)
23
23
U
s
e
r
-
L
e
v
e
l
a
n
d
K
e
r
n
e
l
-
L
e
v
e
l
T
h
r
e
a
d
s
Threads (9)
24
24
Be Safe
Threads and task scheduling play a crucial role in modern operating systems. This chapter delves into the concept of threads, including standard integer typedefs and the importance of multitasking. It explores the implementation of a five-state task scheduler capable of executing multiple tasks efficiently. Additionally, it covers the creation of a priority queue for managing tasks based on their priority levels.

Download Presentation

Please find below an Image/Link to download the presentation.
The content on the website is provided AS IS for your information and personal use only. It may not be sold, licensed, or shared on other websites without obtaining consent from the author. Download presentation by click this link. If you encounter any issues during the download, it is possible that the publisher has removed the file from their server.
E N D
Presentation Transcript
Welcome to CS 345 Operating Systems Chapter 4 Threads (09)
Tip #9: Standard Integer typedefs 2 Threads (9) The actual size of integer types varies by implementation. The standard only requires size relations between the data types and minimum sizes for each data type, such that a long long is not smaller than long, which is not smaller than int, which is not smaller than short. As char's size is always the minimum supported data type, no other data types (except bit-fields) can be smaller. Starting with C99, the following pre-processor macros are defined in the header file <stdint.h>: int8_t int16_t int32_t int64_t uint8_t uint16_t uint32_t uint64_t signed integer type with width of exactly 8, 16, 32 and 64 bits respectively with no padding bits and using 2's complement for negative values (provided only if the implementation directly supports the type) unsigned integer type with width of exactly 8, 16, 32 and 64 bits respectively (provided only if the implementation directly supports the type)
Project 2: Multitasking 4 Threads (9) Contemporary operating systems are built around the concept of processes or tasks. A task is an execution stream in the context of a particular task state. Organizing system activities around tasks has proved to be a useful way of separating out different activities into coherent units. To effectively utilize hardware resources, an operating system must interleave the execution of multiple tasks and still provide reasonable response times. These tasks may or may not be related, should not directly affect the state of another task, but usually always need to share resources in a protected, prioritized, and equitable manner.
Project 2: Multitasking 5 Threads (9) Add a five-state task scheduler to your operating system capable of executing up to 128 tasks in a preemptive, prioritized, round-robin manner. At any point in time, a task will be newly created, ready to run, running, blocked waiting for some event to occur, or exiting. A five-state task scheduler is illustrated as follows:
Step 1: Priority Queue 6 Threads (9) Create a priority queue typedef int16_t TID; typedef int16_t Priority; typedef uint16_t* PQueue; Write queue functions to add/delete elements // task ID // task priority // priority queue TID enQ(PQueue q, TID tid, Priority p); TID deQ(PQueue q, TID tid); -> tid >=0 -1 TID tid -1 THOROUGHLY TEST BEFORE PROCEEDING! q (# | pr1/tid1 | pr2/tid2 | ) find and delete tid from q return highest priority tid (if found and deleted from q) (if q empty or task not found) Priority/TID Priority/TID Priority/TID Priority/TID # of entries
Priority Queue 7 Threads (9) typedef struct { int16_t size; struct { } pq[MAX_TASKS]; } PQ; typedef uint16_t* PQ; Priority/TID Priority/TID Priority/TID Priority/TID # of entries uint8_t tid; uint8_t priority; PQ* rq = (PQ*)malloc(sizeof(PQ)); rq->size = 1; rq->pq[0].tid = tid; rq->pq[0].priority = priority; PQ rq = (PQ)malloc((MAX_TASKS+1) * sizeof(uint16_t)); rq[0] = 1; rq[1] = (priority << 8) + tid; rq->pq[0] = rq->pq[1]; rq[0] = rq[1];
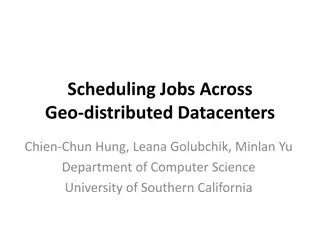
P2 - Tasking Step 2: Schedule w/Ready Queue 8 Threads (9) rq[5] rq[4] rq[3] rq[2] rq[1] rq[5] rq[4] rq[3] rq[2] rq[1] rq[0] rq[0] Create a ready priority queue typedef uint16_t* PQ; // priority queue PQueue rq; rq = (int*)malloc(MAX_TASKS * sizeof(int)); rq[0] = 0; 10 / 3 5 / 2 5 / 0 2 / 1 10 / 3 5 / 2 5 / 0 2 / 1 4 4 // ready queue // init ready queue Add new task to ready queue in createTask enQ(rq, tid, tcb[tid].priority); NOTE: priority = tcb[tid].priority Change scheduler() to deQ/enQ next task if ((tid = deQ(rq, -1)) >= 0) { enQ(rq, tid, tcb[tid].priority); }
2-State Scheduler 9 Threads (9) enQ(rq, tid, tcb[tid].priority) in createTask dispatch() createTask() killTask() Ready Queue New Running Exit swapTask() if ((tid = deQ(rq, -1)) >= 0) enQ(rq, tid, tcb[tid].priority);
PROCESSES AND THREADS Chapter 4 10
CS 345 11 Threads (9) # 4 Project P1: Shell Stalling s Chapter 1: Computer System Overview 2: Operating System Overview 3: Process Description and Control 4: Threads 5: Concurrency: ME and Synchronization 6: Concurrency: Deadlock and Starvation 7: Memory Management 8: Virtual memory 9: Uniprocessor Scheduling 10: Multiprocessor and Real-Time Scheduling 11: I/O Management and Disk Scheduling 12: File Management Student Presentations 4 P2: Tasking 6 P3: Jurassic Park 6 P4: Virtual Memory 6 P5: Scheduling 8 P6: FAT 6
Chapter 4 Learning Outcomes 12 Threads (9) Understand the distinction between process and thread. Describe the basic design issues for threads. Explain the difference between user-level threads and kernel-level threads. Explain how threads are managed. Describe the thread management facility in Windows. Describe the thread management facility in Solaris. Describe the thread management facility in Linux.
What is a Computer Process? 13 Threads (9) Traditionally, a process or task is considered an instance of a computer program that is being executed. A process contains Unit of allocation (resources) Unit of execution (context) Unit of external input (data) Of the above, which are independent of the others? Unit of allocation (resources) process Unit of execution (context) thread or lightweight process Can a thread exist without a process (and vice versa)? Can a process have more than one context? How would switching processes compare to switching threads?
Processes (Heavyweight) 14 Threads (9) What resources might be owned by a process? Code, memory, heap Tables (files, signals, semaphores, buffers, I/O, ) Privileges How is information shared between processes (IPC)? Message Queues Sockets, Files Shared memory, Pipes Signals How would you describe inter-process communication? Expensive: need to context switch. Secure: one process cannot corrupt another process.
Threads (Lightweight) 15 Threads (9) What is a thread? An independent program counter and stack operating within a process - sometimes called a lightweight process (LWP) Smallest unit of processing (context) that can be scheduled by an operating system What resources are owned by a thread? CPU registers (PC, SR, SP, ...) Stack State What do all process threads have in common? Process resources Global variables How would you describe inter-thread communication? Cheap: can use process memory without needing a context switch. Not Secure: one thread can write to memory in use by another thread.
Examples of Threads/Processes 16 Threads (9) 1:N (Java) one process one thread one process multiple threads 1:1 (DOS) multiple processes one thread per process multiple processes multiple threads per process M:N Hybrid Threading (Windows, Solaris) Multi-tasking w/1:1 (UNIX)
Chapter 4 Learning Outcomes 17 Threads (9) Understand the distinction between process and thread. Describe the basic design issues for threads. Explain the difference between user-level threads and kernel-level threads. Explain how threads are managed. Describe the thread management facility in Windows. Describe the thread management facility in Solaris. Describe the thread management facility in Linux.
Multi-threading 18 Threads (9)
Task Control Block (tcb) 19 Threads (9) State = { NEW, READY, RUNNING, BLOCKED, EXIT Priority = { LOW, MED, HIGH, VERY_HIGH, HIGHEST } // task control block typedef struct { char* name; int (*task)(int,char**); int state; int priority; int argc; char** argv; int signal; // void (*sigContHandler)(void); void (*sigIntHandler)(void); // void (*sigKillHandler)(void); // void (*sigTermHandler)(void); // void (*sigTstpHandler)(void); TID parent; int RPT; int cdir; Semaphore *event; void* stack; jmp_buf context; } TCB; // task control block // task name // task address // task state (P2) // task priority (P2) // task argument count (P1) // task argument pointers (P1) // task signals (P1) // task mySIGCONT handler // task mySIGINT handler // task mySIGKILL handler // task mySIGTERM handler // task mySIGTSTP handler // task parent // task root page table (P4) // task directory (P6) // blocked task semaphore (P2) // task stack (P1) // task context pointer (P1) Pending semaphore when blocked.
Types of Threads 20 Threads (9) A thread consists of: a thread execution state (Running, Ready, etc.) a context (program counter, register set.) an execution stack. some per-tread static storage for local variables. access to the memory and resources of its process (shared with all other threads in that process.) OS resources (open files, signals, etc.) Thus, all of the threads of a process share the state and resources of the parent process (memory space and code section.) There are two types of threads: User-space (ULT) and Kernel-space (KLT).
User-Level Threads 21 Threads (9) User-level threads avoid the kernel and are managed by the process. Often this is called "cooperative multitasking" where the task defines a set of routines that get "switched to" by manipulating the stack pointer. Typically each thread "gives-up" the CPU by calling an explicit switch, sending a signal or doing an operation that involves the switcher. A timer signal can force switching. User threads typically can switch faster than kernel threads [however, Linux kernel threads' switching is actually pretty close in performance].
User-Level Threads 22 Threads (9) Disadvantages. User-space threads have a problem that a single thread can monopolize the timeslice thus starving the other threads within the task. Also, it has no way of taking advantage of SMPs (Symmetric MultiProcessor systems, e.g. dual-/quad-Pentiums). Lastly, when a thread becomes I/O blocked, all other threads within the task lose the timeslice as well. Solutions/work arounds. Timeslice monopolization can be controlled with an external monitor that uses its own clock tick. Some SMPs can support user-space multithreading by firing up tasks on specified CPUs then starting the threads from there [this form of SMP threading seems tenuous, at best]. Some libraries solve the I/O blocking problem with special wrappers over system calls, or the task can be written for nonblocking I/O.
Kernel-Level Threads 23 Threads (9) KLTs often are implemented in the kernel using several tables (each task gets a table of threads). The kernel schedules each thread within the timeslice of each process. There is a little more overhead with mode switching from user to kernel mode because of loading of larger contexts, but initial performance measures indicate a negligible increase in time. Advantages. Since the clocktick will determine the switching times, a task is less likely to hog the timeslice from the other threads within the task. I/O blocking is not a problem. If properly coded, the process automatically can take advantage of SMPs and will run incrementally faster with each added CPU.
User-Level and Kernel-Level Threads 24 Threads (9)













")
")



")