Understanding Action and Perception through Minimization of Prediction Error
This talk by Karl Friston delves into how our interaction with the environment can be explained by the minimization of surprise or prediction error. It explores the role of predictive coding in perception and motor reflexes in action, showcasing phenomena like hierarchical brain messaging and perceptual inference through simulations based on attractor dynamics.

Download Presentation

Please find below an Image/Link to download the presentation.
The content on the website is provided AS IS for your information and personal use only. It may not be sold, licensed, or shared on other websites without obtaining consent from the author. Download presentation by click this link. If you encounter any issues during the download, it is possible that the publisher has removed the file from their server.
E N D
Presentation Transcript
Experimental Chaos and Complexity Conference 2014 Free energy and life as we know it Karl Friston, University College London How much about our interaction with and experience of our world can be deduced from basic principles? This talk reviews recent attempts to understand the self-organised behaviour of embodied agents, like ourselves, as satisfying basic imperatives for sustained exchanges with the environment. In brief, one simple driving force appears to explain many aspects of action and perception. This driving force is the minimisation of surprise or prediction error. In the context of perception, this corresponds to Bayes-optimal predictive coding that suppresses exteroceptive prediction errors. In the context of action, motor reflexes can be seen as suppressing proprioceptive prediction errors. We will look at some of the phenomena that emerge from this scheme, such as hierarchical message passing in the brain and the perceptual inference that ensues. I hope to illustrate these points using simple simulations of action and perception that rest upon attractor dynamics
Overview The statistics of life Markov blankets and ergodic systems simulations of a primordial soup The anatomy of inference graphical models and predictive coding canonical microcircuits Action and perception synchronization of chaos and birdsong
How can the events in space and time which take place within the spatial boundary of a living organism be accounted for by physics and chemistry? (Erwin Schr dinger 1943) The Markov blanket as a statistical boundary (parents, children and parents of children) Internal states External states Sensory states Active states
The Markov blanket in biotic systems Sensory states = ( , , ) s a + s f s s = ( , , ) s a + f ( , , ) s a f External states Internal states ( , , ) f s a a a Active states
Take any random dynamical system (m) = + ( ) f x x ( | ) p x m = = ) ln ( | ) Q p x m ( | ) p x m 0 ( ) f x ( The flow of states with curl-free and divergence-free components
But what about the Markov blanket? = s a ( , , ) s = = ( ) s ( ) ln ( | p s m ) f Q Perception ( ) ( ) ln ( | p s m ) f s Q Action a a [ ln ( | = )] tE p s m Self-organisation, cybernetics, homoeostasis and autopoiesis Entropy Haken = ( | p s m ) Bayesian brain, predictive coding and active inference Model evidence Ashby Gregory Helmholtz
Overview The statistics of life Markov blankets and ergodic systems simulations of a primordial soup The anatomy of inference graphical models and predictive coding canonical microcircuits Action and perception synchronization of chaos and birdsong
Simulations of a (prebiotic) primordial soup Position Short-range forces Strong repulsion Weak electrochemical attraction
Finding the (principal) Markov blanket Markov blanket matrix: encoding the children, parents and parents of children = + + T T B A A A A Markov Blanket = [B [eig(B) > ]] Adjacency matrix Markov Blanket 20 Hidden states 40 A 60 80 Sensory states Active states Internal states 100 120 20 40 60 80 100 120 Element Does action maintain the structural and functional integrity of the Markov blanket (autopoiesis) ? Do internal states appear to infer the hidden causes of sensory states (active inference) ?
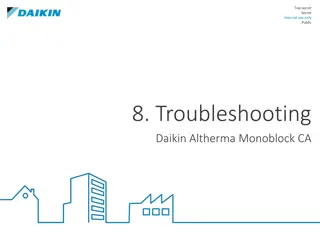
Active lesion Markov blanket 8 8 6 6 4 4 2 2 0 0 -2 -2 -4 -4 -6 -6 -8 -8 -8 -6 -4 -2 0 2 4 6 8 -8 -6 -4 -2 0 2 4 6 8 Position Position Autopoiesis, oscillator death and simulated brain lesions Sensory lesion Internal lesion 8 8 6 6 4 4 2 2 0 0 -2 -2 -4 -4 -6 -6 -8 -8 -8 -6 -4 -2 0 2 4 6 8 -8 -6 -4 -2 0 2 4 6 8 Position Position
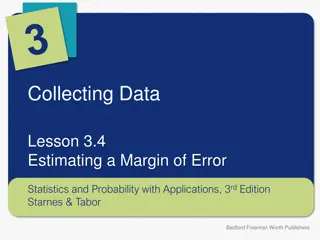
Decoding through the Markov blanket and simulated brain activation True and predicted motion 0 Christiaan Huygens Motion of external state -0.1 -0.2 Predictability -0.3 8 6 -0.4 4 100 200 300 400 500 2 Position Time 0 -2 Internal states -4 -6 5 -8 -5 0 5 10 Position Modes 15 20 25 30 100 200 300 400 500 Time
The existence of a Markov blanket necessarily implies a partition of states into internal states, their Markov blanket (sensory and active states) and external or hidden states. Because active states change but are not changed by external states they minimize the entropy of internal states and their Markov blanket. This means action will appear to maintain the structural and functional integrity of the Markov blanket (autopoiesis). Internal states appear to infer the hidden causes of sensory states (by maximizing Bayesian evidence) and influence those causes though action (active inference)
Overview The statistics of life Markov blankets and ergodic systems simulations of a primordial soup The anatomy of inference graphical models and predictive coding canonical microcircuits Action and perception synchronization of chaos and birdsong
Objects are always imagined as being present in the field of vision as would have to be there in order to produce the same impression on the nervous mechanism - von Helmholtz Hermann von Helmholtz Richard Gregory Geoffrey Hinton The Helmholtz machine and the Bayesian brain Thomas Bayes Richard Feynman
Objects are always imagined as being present in the field of vision as would have to be there in order to produce the same impression on the nervous mechanism - von Helmholtz Impressions on the Markov blanket Hermann von Helmholtz Richard Gregory Plato: The Republic (514a-520a)
Bayesian filtering, free energy and predictive coding = = ( D ) ln ( | ) ( ) ( , | ) Q p s m Q F s m prediction correction = ( ) s g prediction error
Making our own sensations sensations predictions Prediction error Action Perception Changing sensations Changing predictions
David Mumford Predictive coding with reflexes Perception Prediction error (superficial pyramidal cells) Higher vocal centre = = ( ) i x ( ) i x ( ) i ( ) i x ( ) i v ( , ) D f ( ) i ( ) i v ( 1) i v ( ) i ( ) i x ( ) i v ( , ) g Expectations (deep pyramidal cells) = = ( ) i x ( ) i x ( ) i ( ) i ( ) i x T D D x ( ) i + Area X ( ) i v ( ) i v ( ) i ( ) i ( 1) i D v v Thalamus Hypoglossal Nucleus = = ( ) i x ( ) i x ( ) i x exp( ) ( ) i v ( ) i v ( ) i v exp( ) = (1) a s Action
Biological agents minimize their average surprise (free energy) They minimize surprise by suppressing prediction error Prediction error can be reduced by changing predictions (perception) Prediction error can be reduced by changing sensations (action) Perception entails recurrent message passing to optimize predictions Action makes predictions come true (and minimizes surprise)
Overview The statistics of life Markov blankets and ergodic systems simulations of a primordial soup The anatomy of inference graphical models and predictive coding canonical microcircuits Action and perception synchronization of chaos and birdsong
Perceptual inference and sequences of sequences Area X Higher local centre Syrinx sonogram (1) 1 (1) 2 Frequency (KHz) (2) 1 (2) 2 0.5 1 1.5 Time (sec) External states Sensory states Internal states
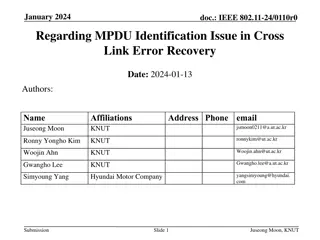
Bird Song percept 5000 4500 4000 Frequency (Hz) 3500 3000 2500 1 2 3 4 5 6 7 time (sec) First level expectations (hidden states) 100 50 0 -50 0 1 2 3 4 5 6 7 8 time (seconds) Second level expectations (hidden states) 80 60 40 20 0 -20 -40 0 1 2 3 4 5 6 7 8 time (seconds)
Bird Song percept 5000 4500 4000 Frequency (Hz) 3500 Active inference and communication 3000 2500 1 2 3 4 5 6 7 time (sec) First level expectations (hidden states) 100 50 0 -50 0 1 2 3 4 5 6 7 8 time (seconds) Second level expectations (hidden states) 80 60 40 20 0 -20 -40 0 1 2 3 4 5 6 7 8 time (seconds)
Thank you And thanks to collaborators: Rick Adams Andre Bastos Sven Bestmann Harriet Brown Jean Daunizeau Mark Edwards Xiaosi Gu Lee Harrison Stefan Kiebel James Kilner J r mie Mattout Rosalyn Moran Will Penny Lisa Quattrocki Knight Klaas Stephan And colleagues: Andy Clark Peter Dayan J rn Diedrichsen Paul Fletcher Pascal Fries Geoffrey Hinton Allan Hobson James Hopkins Jakob Hohwy Henry Kennedy Paul Verschure Florentin W rg tter And many others
Time-scale Free-energy minimisation leading to 3 10 s Perception and Action: The optimisation of neuronal and neuromuscular activity to suppress prediction errors (or free- energy) based on generative models of sensory data. 0 10 s Learning and attention: The optimisation of synaptic gain and efficacy over seconds to hours, to encode the precisions of prediction errors and causal structure in the sensorium. This entails suppression of free-energy over time. 3 10 s Neurodevelopment: Model optimisation through activity- dependent pruning and maintenance of neuronal connections that are specified epigenetically 6 10 s Evolution: Optimisation of the average free-energy (free-fitness) over time and individuals of a given class (e.g., conspecifics) by selective pressure on the epigenetic specification of their generative models. 15 10 s




 …")


")
 Markov blanket")