Signal Resampling & Digital Filter Implementation
Explore the intricacies of implementing high-complexity digital filters for signal resampling, delving into multistage design, filter order determination, clever low-pass filter strategies, and handling passband and stopband specifications effectively.

Download Presentation

Please find below an Image/Link to download the presentation.
The content on the website is provided AS IS for your information and personal use only. It may not be sold, licensed, or shared on other websites without obtaining consent from the author. Download presentation by click this link. If you encounter any issues during the download, it is possible that the publisher has removed the file from their server.
E N D
Presentation Transcript
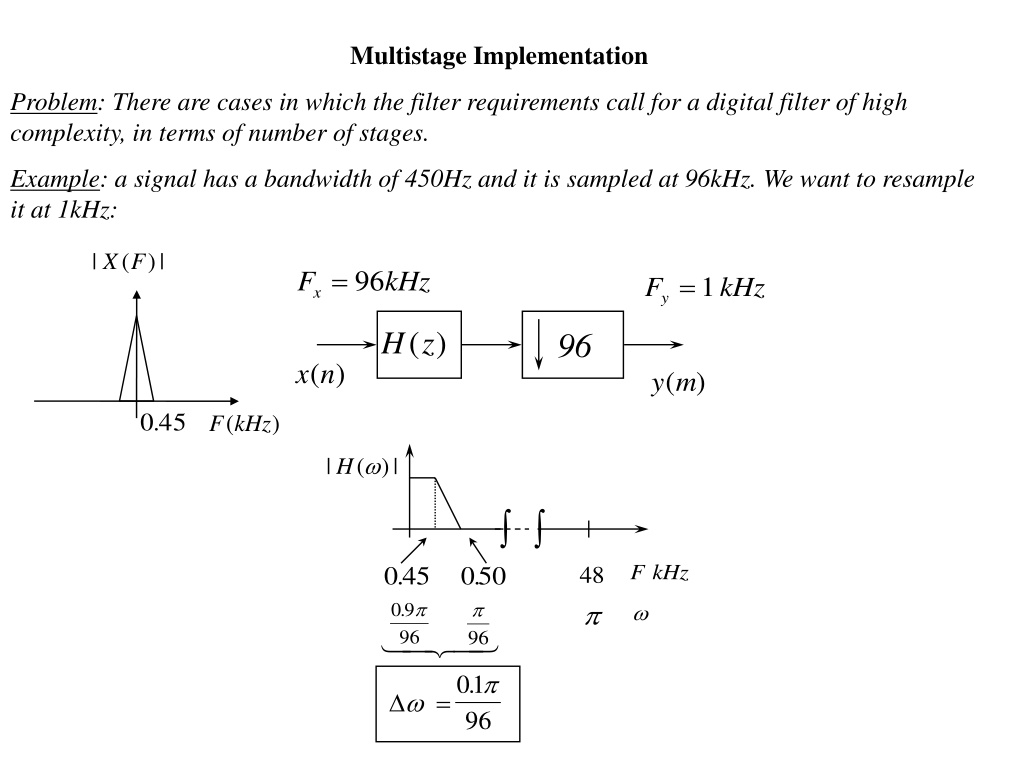
Multistage Implementation Problem: There are cases in which the filter requirements call for a digital filter of high complexity, in terms of number of stages. Example: a signal has a bandwidth of 450Hz and it is sampled at 96kHz. We want to resample it at 1kHz: | ( )| X F x= 96 F kHz y=1 F kHz ( ) H z 96 x n ( ) y m ( ) 045 . ( ) F kHz ( )| H | F kHz 045 . 09 96 050 . 96 =01 96 48 . .
Solution: for an FIR filter designed by the window method, the order of the filter is determined by the size of the transition region. With a Hamming Window the order is determined by the equation 8 M 01 96 . = = M = = 960 8 7 680 , which yields Disdvantage: a lot of computations at a high freq. rate 7 680 96 000 , = 074 109 . , /sec multiplies
One Stage Implementation: we decimate in one shot. F D x F = x F y LPF D x n ( ) y m ( ) Multistage Implementation: we decimate the signal in several stages. F D = x F x= F F y 1 F2 F3 FL x n ( ) D2 D D 1 DL D1 H2 HL H1 ( ) y m DL = D 2
See the last stage first: L( ) x n y m ( ) F D F D FL HL DL = = L x F y L H ( ) L p D L / 2 F F y F p Passband: 0 F p F F D F F y = = = 2 F L Stopband: , since / 2 y F / 2 F L 2 2 D L L L / 2 y F This filter clears everything above .
Hi Problem: we can design the low pass filters in a clever way, by taking into consideration that the spectrum is bandlimited. ( ) X [ ] 1[ ] m + ix ix n F D Fi Hi Di += 1 i F i i i X ( ) 1( ) + i X pass stop y F aliased 2 y F Fi+1 2 F y F Fi+1 Fi+1 2 Fi 2 F 2 2 iD
Hi Problem: we can design the low pass filters in a clever way, by taking into consideration that the spectrum is bandlimited. ( ) X x n i+1( ) x m i( ) F D Fi Hi Di += 1 i F i i : ( ) H 0 Fp F F Hi Specs for i pass: + 2 2 F stop: 1 i y i Fi 2 F F Fp y F+ 1 i 2
Pass Band Stop Band Sampling Freq. [0, 450] Hz > 500 Hz 96 kHz Example: same problem we saw before: Use Multistage. = = = 96 12 2 F kHz F kHz F kHz = kHz 1 F 2 3 1 4 H3 H2 H1 6 2 8 x n ( ) y m ( ) F kHz 050 . 045 . 09 2 01 . 045 . 09 12 21 12 46 15 . 3 12 . 045 . 09 96 221 96 35 115 . 23 96 . . . rad . 2 rad 2 160 order M 05 106 . 03 106 . mult./sec 34 106 .
Efficient Multirate Implementation Goal: we want to determine an efficient implementation of a multirate system. For example in Decimation and Interpolation: ) (n s (n ) x (m ) y (z ) H D (mD ) s you have to compute only, ie. one every D samples. (n ) (m ) x y (z ) H I (m ) s most of the values of s(mD) are zero
Noble Identities: (n ) (n ) x x (m ) (m ) y y (z ) G D D D ( ) G z k = ( ) ( ) ( ) y m mD g k x k = ( ) ( ) ( ) y m g m x D D = 0 if k D = ( ) ( ) ( ) y m g mD D x D D (m ) g ( ) g 2n = 2 ( 2 ) ( ) g m g m m 1 n 1 2z ( ) G (z ) G
For example take an FIR Filter x n ( ) y m ( ) x n ( ) y m ( ) h( ) 0 h( ) 0 D D z 1 D z h( ) 1 h( ) 1 z 1 D z h( ) 2 h( ) 2 since D z 1 D D z
Similarly: (n ) x (n ) (m ) (m ) y x y (z ) G M M M ( ) G z = = ( ) ( ) if g k x k m M k = ( ) ( ) ( ) y m g m kM x k ( ) y m k M otherwise 0 = 0 if m M ( ) = = ( ) ( ) if g k M x k m M M ( ) y m otherwise 0 (m ) g ( ) g 2n = 2 ( 2 ) ( ) g m g m 1 m 1 n 2z ( ) G (z ) G
x n ( ) y m ( ) x n ( ) y m ( ) h( ) 0 h( ) 0 M M z 1 M z h( ) 1 h( ) 1 z 1 M z h( ) 2 h( ) 2 since M M z 1 M z
Application: POLYPHASE Filters x n ( ) y m ( ) H z ( ) 2 Decimator: take, for example, D=2 = = + + 2 1 2 n m m ( ) h n z ( ) h m z ( 2 ) h m ( 2 1 ) H z z z n m m = + 2 1 2 ( ) ( ) ( ) H z H z e z H z o even odd
x n ( ) Therefore this system becomes: 2 e( ) H z y m ( ) z 1 2 o( ) H z 2 x n ( ) 2 e( ) H z 2 Filtering at High Sampling Rate z 1 y m ( ) 2 o( ) H z 2 Filtering at Low Sampling rate x n ( ) e( ) H z 2 z 1 y m ( ) o( ) H z 2
Similarly: x n ( ) x n ( ) y m ( ) 2 ( ) H z 2 H z ( ) 2 o z 1 y m ( ) 2 ( ) H z e x n ( ) Filtering at High Sampling Rate ( ) H z 2 o z 1 y m ( ) ( ) H z 2 e Filtering at Low Sampling Rate
Example: Consider the Filter/Decimator structure shown below, with (n ) s (n ) x (m ) y 2 . 1 = 6 . 0 + 5 . 1 + 0 . 2 + 1 2 3 4 ( ) 4 H z z z z z (z ) 2 H 0 . 2 5 . 1 + 6 . 0 + 2 . 1 + 5 6 7 8 z z z z 2 ( ) H z 2 . 1 + 5 . 1 2 + 4 z 4 5 . 1 + z + 6 2 . 1 + z 8 e 1 This can be written as = + + ( ) H z + z 2 4 6 6 . 0 0 . 2 0 . 2 6 . 0 z z z z ( H o ) 2 z and implemented in Polyphase form: x n ( ) 2 5 . 1 + + 5 . 1 + 2 . 1 + 1 2 3 4 2 . 1 4 z z z z z 1 y m ( ) 0 . 2 6 . 0 + 1 2 3 6 . 0 2 z z z 2
General Polyphase Decomposition Given any integer N: + + 1 N ( ) = = + n Nk [ ] h n z [ ] H z z h kN z = = = 0 n k ( ) N H z ( ) z ( ) z ( ) z ) 1 = + + + 1 ( N N N N ( ) ... H z H z H z H 0 1 1 N Example: take N=3 = 5 . 3 . + 2 . 4 6 . 0 + 4 . 1 2 . 0 7 . 0 + 1 2 3 4 5 6 7 ( ) 1 . 2 H z z z z z z z z = = = 2 . 4 + 3 3 6 ( ) 1 . 2 2 . 0 H z z z 0 + 3 3 6 ( ) 5 . 6 . 0 7 . 0 H z z z 1 3 3 ( ) 3 . 4 . 1 H z z 2
Apply to Downsampling ( ) z N [m y ] H [n x ] POLYPHASE ( ) N H z 1 N 1 z ( ) N H z 2 1 z ( ) N H z 1 1 z [n x ] [m y ] ( ) N N H z 0
apply Noble Identity N ( ) z H 1 N 1 z ( ) z N H 2 1 z ( ) z N H 1 1 z [n x ] [m y ] ( ) z N H 0
Serial to Parallel (Buffer) N = + 1[ ] m [( 1) 1] N x x m N 1 z N = 1[ ] x m [ 1] x mN 1 z [n x ] N = 0[ ] x m [ ] x mN Serial to Parallel (Buffer): 1[ ] m N x [n x ] 1 3 5 S/P 1 2 3 4 5 6 2 4 6 N [ ] 0m x = = 0 n n N m = 0
Same for Upsampling ( ) z N H [n x ] [m y ] POLYPHASE ( ) z [n x ] N [m y ] N H0 1 z ( ) z N H1 1 z ( ) z N H 1 N
apply Noble Identity ( ) z N [n x ] H [m y ] NOBLE IDENTITY [n x ] ( ) z [m y ] H0 N 1 z ( ) z H1 N 1 z ( ) z HN 1 N
Parallel to Serial (Unbuffer or Interlacer) N [ ] y m [ ] y 0n 1 z N 1[ ] n y N This is a Parallel to Serial (an Unbuffer): 0[ ] y n [ ] y m P/S 1 3 5 2 4 6 N 1 2 3 4 5 6 1[ ] n y N = n = m = m N 1 0 n = 0











")

")





")


")