Formal Verification and Automata Abstraction in Esterel
Esterel de A à Z
6.
Exec, vérification formelle, HipHop.js
Gérard Berry
Collège de France
Chaire Algorithmes, machines et langages
Cours du 28 mars 2018
Précédé du séminaire de Lionel Rieg
gerard.berry@college-de-france.fr
http://www-sop.inria.fr/members/Gerard.Berry
•
Travaille sur les automates explicites (option –A)
•
Abstraction
des donn
ées et de
signaux, r
éduction par
bisimulation observationnelle
(cf cours du )
•
Systèmes :
–
Auto
(R. de Simone, D. Vergamini)
:
calcul efficace des réductions
–
Autograph
(V. Roy)
: dessin interactif des automates réduits
(
Auto
et
Autograph
ont eu bien d’autres applications)
21/02/2018
2
G. Berry, Collège de France
V
érification par abstraction d’automates
Tr
è
s utile, mais limit
é par le risque d’explosion des automates
Plus récents :
UPPAAL
(c. 30/03/2016),
CADP
(c. 06/04/2016)
21/02/2018
3
G. Berry, Collège de France
Exemple : robotique en ORRCAD
21/02/2018
4
G. Berry, Collège de France
Exemple : robotique en ORRCAD
The International Journal
of Robotics Research
,
April 1st, 1998
•
Tr
ès utile,
même si elle
ne traite pas les donn
ées
•
Utilisée en grand par
Dassault Aviation
et d’autres en
logiciel, puis pour les circuits de contrôle (
Intel
,
T.I.
, etc.)
•
Fondée surtout sur le package de BDD
TiGeR
(
O. Coudert
,
J-C. Madre
et
H. Touati
) et développée par
A. Bouali
•
Principe :
calcul des états atteignables
, après
abstraction
éventuelles selon les propriétés à prouver
•
Calcul de
contre-exemples
par exploration inverse de
l’espace d’états
21/02/2018
5
G. Berry, Collège de France
V
érification booléenne par BDDs
Utilit
é majeure aussi dans la
génération de tests
,
par contre-exemples à des propriétés évidemment fausses
Ascenseur :
Il est impossible de visiter tous les étages et d’y ouvrir la porte
21/02/2018
6
G. Berry, Collège de France
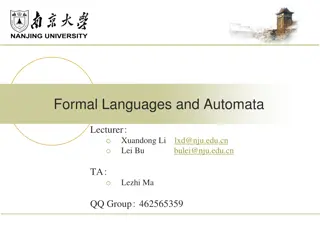
2. Calcul des
états accessibles (RSS)
(
voir cours du 21 mars 2018)
A chaque étape,
utiliser
R
i
et
V
comme
simplifieurs pour
C
R
R
0
= 0
R
1
=
R
0
⋃
C
R
(
R
0
,
V
)
...
R
i+1
=
R
i
⋃
C
R
(
R
i
,
V
)
…
R
n+1
=
R
n
⋃
C
R
(
R
n
,
V
)
=
R
n
⟹
RSS=R
n
contre-exemple
•
Principe du
Bounded Model Checking
(
BMC
)
–
construire une formule
SAT
(contr
ôle) ou
SMT
(contrôle +
données) par
dépliement progressif de l’espace d’états
→ états accessibles en
1, 2, 3, … transitions
–
détecte toutes les erreurs, mais on ne sait pas quand…
–
des méthodes récentes incorporent la recherche automatique
de
propriétés inductives
pour la preuve totale
21/02/2018
7
G. Berry, Collège de France
Bounded Model Checking en SAT / SMT
Pour Esterel v7 : v
érifieur SAT / SMT Prover SL
de
Prover Technologies
(
G. Stålmark
)
21/02/2018
8
G. Berry, Collège de France
L
’ascenseur en Esterel v7
data
SizeData
:
constant
N
: integer = 4;
end data
interface
TimerIntf
:
output
StartTimer
;
input
TimerExpired
;
end interface
interface
ElevatorEngineIntf
:
output
Start
;
output
Up
;
output
Down
;
output
Stop
;
input
CabinStopped
;
end interface
// This interface comprises the sensors that tell the cabin is reaching a floor.
interface
FloorSensorIntf
:
data
SizeData
;
input
ReachingFloor
[
N
];
end interface
21/02/2018
9
G. Berry, Collège de France
interface
CabinIntf
:
// user door control buttons
input
DoorOpen
;
input
DoorClose
;
// the sensor unit that signals traversal of door ( light cell ) and shocks
input
DoorSensor
;
// the sensors that signals proper door opening and closing
input
DoorIsOpen
;
input
DoorIsClosed
;
// basic input relations
input relation
DoorIsClosed
#
DoorSensor
;
input relation
DoorIsClosed
#
DoorOpen
;
// Alfred de Musset
// commands to drive door opening and closing motors
output
OpenDoorMotorOn
;
output
OpenDoorMotorOff
;
output
CloseDoorMotorOn
;
output
CloseDoorMotorOff
;
end interface
21/02/2018
10
G. Berry, Collège de France
interface
ButtonsAndLightsIntf
:
data
SizeData
;
input
CabinCall
[
N
];
// numbered buttons in the cabin
input
UpCall
[
N
];
// up buttons at floors (fake one at floor N -1)
input
DownCall
[
N
];
// down buttons at floors (fake one at floor 0)
output
CurrentUp
;
// up arrows at floors and in cabin
output
CurrentDown
;
// down arrows at floors and in cabin
output
CurrentFloor
[
N
];
// to light up current floor number (one-hot array )
output
StoppedAtFloor
[
N
];
// triggers a bell at floor
output
PendingCabinCall
[
N
];
// sent to the cabin floor button lights
output
PendingUpCall
[
N
];
// sent to floor up button lights
output
PendingDownCall
[
N
];
// sent to floor down button lights
output
PendingCall
[
N
];
// some pending call at floor N
end interface
21/02/2018
11
G. Berry, Collège de France
module Cabin :
extends
TimerIntf
;
extends
CabinIntf
;
input
CabinStopped
;
// the signal that tells the elevator is stopped
loop
trap
Done
in
loop
emit
OpenDoorMotorOn
;
await
DoorIsOpen
;
emit
OpenDoorMotorOff
;
abort
finalize
emit
StartTimer
;
await
TimerExpired
or
DoorClose
;
emit
CloseDoorMotorOn
;
await
DoorIsClosed
;
exit
Done
with
emit
CloseDoorMotorOff
;
end finalize
when
DoorOpen
or
DoorSensor
end loop
end trap;
await
CabinStopped
end loop
end module
21/02/2018
12
G. Berry, Collège de France
module
CallHandler
:
data
SizeData
;
extends
ButtonsAndLightsIntf
;
extends
ElevatorEngineIntf
;
extends
FloorSensorIntf
;
input
DoorIsClosed
;
// from cabin
signal
CallToGoUp
,
CallToGoDown
in
<compute current floor and decide whether to stop >
||
<compute StoppedAtFloor [i] for each floor i>
||
<compute pending calls >
||
<compute calls to go up or down >
||
<compute CurrentUp or CurrentDown directions >
||
<start motor in appropriate direction >
||
<internal consistency assertions >
end signal
end module
21/02/2018
13
G. Berry, Collège de France
<compute current floor and decide whether to stop>
emit
CurrentFloor
[1];
always
signal ReachingSomeFloor in
for
i
<
N
dopar
if
ReachingFloor
[
i
] then
emit
ReachingSomeFloor
;
// set current floor i; automatically resets previous current floor
emit
CurrentFloor
[
i
];
// we have to stop if we are moving in a direction and
// either there is a floor call for the same direction at this floor
// or there is no more call at further floors in the same direction
// warning : we have to take pre( CurrentUp ) because CurrentUp
// is reset in the instant if there is no call up
if ((pre(
CurrentUp
) and (
PendingUpCall
[
i
] or not
CallToGoUp
))
or (pre(
CurrentDown
) and (
PendingDownCall
[
i
] or not
CallToGoDown
)))
then
emit
Stop
end
else
// not reaching floor i , we simply need to cancel potential current
// floor emission if some other floor has just been reached .
emit
CurrentFloor
[
i
] <= pre(
CurrentFloor
[
i
]) and not
ReachingSomeFloor
end if
end for
end signal
end always
21/02/2018
14
G. Berry, Collège de France
<compute StoppedAtFloor [i] for each floor i>
weak abort
sustain
StoppedAtFloor
[1]
when
Start
;
for
i
<
N
dopar
loop
await
ReachingFloor
[
i
] and
Stop
;
await
CabinStopped
;
weak abort
sustain
StoppedAtFloor
[
i
]
when
Start
end loop
end for
21/02/2018
15
G. Berry, Collège de France
<compute pending calls >
for
i
<
N
dopar
always
if (not
StoppedAtFloor
[i]) then
emit {PendingCabinCall
[i] <=
CabinCall
[i] or pre(
PendingCabinCall
[i]),
PendingUpCall
[i] <=
UpCall
[i] or pre(
PendingUpCall
[i]),
PendingDownCall
[i] <=
DownCall
[i] or pre(
PendingDownCall
[i]),
PendingCall
[i] =
PendingCabinCall
[i]
or
PendingUpCall
[i] or
PendingDownCall
[i],
}
end if
end always
end for
21/02/2018
16
G. Berry, Collège de France
<compute calls to go up or down >
signal
AuxUpFloor
[
N
],
AuxCallToGoUp
[
N
] in
sustain { seq {for
i
<
N
-1 doup
AuxUpFloor [
i
+1] <=
CurrentFloor
[
i
] or
AuxUpFloor
[
i
],
AuxCallToGoUp
[
i
+1] <= (
PendingCall
[
i
+1] and
AuxUpFloor
[i
+1])
or
AuxCallToGoUp
[
i
]
end for
},
CallToGoUp
<=
AuxCallToGoUp
[
N
-1]
}
end signal
||
// computing whether there is a call for going down
// Warning : this code uses a combinational down carry chain
signal
AuxDownFloor
[
N
],
AuxCallToGoDown
[
N
] in
sustain { seq {for
i
<
N
-1 dodown
AuxDownFloor
[
i
] <=
CurrentFloor
[
i
+1] or
AuxDownFloor
[
i
+1] ,
AuxCallToGoDown
[
i
] <= (
PendingCall
[
i
] and
AuxDownFloor
[
i
])
or
AuxCallToGoDown
[
i
+1]
end for
},
CallToGoDown
<=
AuxCallToGoDown
[0]
}
end signal
21/02/2018
17
G. Berry, Collège de France
<compute CurrentUp or CurrentDown directions >
loop
await
case immediate
CallToGoUp
do
abort
sustain
CurrentUp
when not
CallToGoUp
case immediate
CallToGoDown
do
abort
sustain
CurrentDown
when not
CallToGoUp
end await
end loop
21/02/2018
18
G. Berry, Collège de France
<start motor in appropriate direction >
loop
await
StartOK
;
await immediate
CallToGoUp
or
CallToGoDown
;
emit
Start
;
if
case pre(
CurrentUp
) and
CallToGoUp
do
emit
Up
case pre(
CurrentDown
) and
CallToGoDown
do
emit
Down
case
CallToGoUp
do
emit
Up
case
CallToGoDown
do
emit
Down
end if
end loop
21/02/2018
19
G. Berry, Collège de France
Assertions de coh
érence interne
sustain {// there is always a direction given at start time
assert
SomeDirection
=
Start
=> (
Up
or
Down
),
// always start up at bottom floor
assert
NoBottomCrash
= (
StoppedAtFloor
[0] and
Start
) =>
Up
,
// always start down at top floor
assert
NoTopCrash
= (
StoppedAtFloor
[N -1] and
Start
) =>
Down
,
// tell stopped at only one floor at a time (as is, not parametric in N)
assert
StopOK
=
StoppedAtFloor
[0] #
StoppedAtFloor
[1]
#
StoppedAtFloor
[2] #
StoppedAtFloor
[3]
}
21/02/2018
20
G. Berry, Collège de France
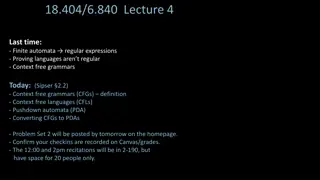
V
érification par
observateurs
(N. Halbwachs)
Env
Prog
Obs
E
BUG
Pour toutes les s
équences d’entrée
OK
,
l
’observateur n’émet jamais
BUG
OK
21/02/2018
21
G. Berry, Collège de France
Assertion temporelle :
l
’ascenseur ne voyage pas la porte ouverte
signal
Running
in
loop
await
Start
;
abort
sustain
Running
when
CabinStopped
end loop
||
loop
await
OpenDoorMotorOn
;
abort
sustain
assert
DoorOpenedWhenMovingBug
if
Running
when
DoorIsClosed
end loop
end signal
•
Mais l
’ascenseur n’évolue pas dans un
environnement physique quelconque !
⟹
caractérisation de l’environnement,
indispensable pour
vérifier les propriétés
et
produire des
contre-exemples pertinents
en
réduisant les entrées et l’espace d’états
21/02/2018
22
G. Berry, Collège de France
D
éfinition de l’environnement
La caract
érisation de l’environnement est
souvent longue et délicate !
… mais elle nous en apprend beaucoup
21/02/2018
23
G. Berry, Collège de France
Contraintes d
’environnement de l’ascenseur
trap
Bad
in
always
// no up call button at top floor
if
UpCall
[
N
-1] then exit
Bad
end
||
// no down call button at bottom floor
if
DownCall
[0] then exit
Bad
end
||
// elevator is at most at one floor at a time
if not (
ReachingFloor
[0]
#
ReachingFloor
[1]
#
ReachingFloor
[2]
#
ReachingFloor
[3] ) then
exit
Bad
end if
||
// A door must be open or closed ( Musset )
if not (
DoorIsOpen
#
DoorIsClosed
) then
exit
Bad
end if
end always
21/02/2018
24
G. Berry, Collège de France
Contraintes d
’environnement de l’ascenseur
||
// at most one TimerExpired after StartTimer
abort
every immediate
TimerExpired
do exit
Bad
end
when
StartTimer
;
loop
if
TimerExpired
then exit
Bad
end;
await
TimerExpired
;
every
TimerExpired
do exit
end
each
StartTimer
||
// at most one CabinStopped with one tick to react
loop
weak abort
every immediate
CabinStopped
do exit
Bad
end
when Stop ;
await
CabinStopped
;
pause
end loop
21/02/2018
25
G. Berry, Collège de France
Contraintes d
’environnement de l’ascenseur
||
signal
ReachingSomeFloor
,
ShiftedCurrentFloor
[N+3] ,
MovingUp
,
MovingDown
in
sustain {for
i
<
N
dopar
ReachingSomeFloor
<=
ReachingFloor
[i]
end for
}
||
// cannot reach a floor between Stop and Start
loop
weak abort
every
ReachingSomeFloor
do exit
Bad
end
when
Start
;
await
Stop
end loop
21/02/2018
26
G. Berry, Collège de France
Contraintes d
’environnement de l’ascenseur
||
signal
ReachingSomeFloor , ShiftedCurrentFloor [N+3] ,
MovingUp , MovingDown
in
…
||
// when at floor i , the next floor is necessarily i+1 or i-1
loop
abort
sustain {for i < N do
ShiftedCurrentFloor
[i+1] <= pre(
ShiftedCurrentFloor
[i+1])
end for
}
when immediate
ReachingSomeFloor
;
emit {for i < N do
ShiftedCurrentFloor
[i +1] <=
ReachingFloor
[i]
end for
};
pause
end loop
21/02/2018
27
G. Berry, Collège de France
Contraintes d
’environnement de l’ascenseur
||
signal
ReachingSomeFloor , ShiftedCurrentFloor [N+3] ,
MovingUp , MovingDown
in
…
||
loop
await
Start
;
weak abort
if
case
Up
do sustain
MovingUp
case
Down
do sustain
MovingDown
default do emit
Ignore
end if
when
Stop
end loop
21/02/2018
28
G. Berry, Collège de France
Contraintes d
’environnement de l’ascenseur
||
signal
…
||
emit
ShiftedCurrentFloor
[2] ;
weak abort
every immediate
ReachingSomeFloor
do exit
Bad
end
when
Start
;
loop
await
ReachingSomeFloor
;
for
i
<
N
dopar
if
ReachingFloor
[
i
] then
if
MovingUp
and not pre(
ShiftedCurrentFloor
[
i
]) then
exit
Bad
end if ;
if
MovingDown
and not pre(
ShiftedCurrentFloor
[
i
+2]) then
exit
Bad
end if ;
end if
end for
end loop
end signal
handle
Bad
do
emit
Ignore
end trap
end module
1. La v
érification formelle en Esterel
2. Interfacer le code g
énéré et le simuler
21/02/2018
29
G. Berry, Collège de France
Agenda
•
En circuits
: engendrer du Verilog, utiliser une CAO
standard
•
En logiciel :
plusieurs mani
ères équivalentes d’engendrer
un code C (ou C++, etc.), et plusieurs façons de l’intégrer
dans du code plus général
–
principe :
définir des fonctions associées aux sorties,
donner les entrées, appeler la fonction de réaction
–
pas de contrainte spécifique sur quand et comment
–
mais une
contrainte absolue
:
l’exécution du code de la
fonction de réaction doit être
atomique
.
–
en particulier,
les valeurs des entrées doivent rester
constantes
pendant toute la réaction
21/02/2018
30
G. Berry, Collège de France
Comment ex
écuter un programme
Esterel
21/02/2018
31
G. Berry, Collège de France
Exemple pour ABRO
void
ABRO_
O_
O () {printf(”O emitted\n”);
}
void main () {ABRO_reset
();
// ABRO initialization
ABRO
();
// empty tick
ABRO_I_
A
();
// input A
ABRO_I_
B
();
// input B, same instant
ABRO
();
// tick, emits O
ABRO_I_
R
();
// input R, reset
}
BLEU :
à définir par l’utilisateur
MARRON :
défini par le compilateur Esterel
•
Seule chose
à définir : les types et fonctions de données
•
Trois types de simulation :
–
textuelle :
entrée des signaux au terminal ou par fichier
–
textuelle :
traçage optionnel des signaux, variables, etc.
–
graphique :
xes
,
Esterel Studio
–
textuelle :
entrées par clics, sorties visuelles
animation colorée du code source
–
mixte :
magnétophone dans les simulateurs graphiques
mixte :
lisant et écrivant les formats textuels
–
21/02/2018
32
G. Berry, Collège de France
Simuler un programme Esterel
Usage :
debugging, non-r
égression,
exécution des tests engendrés automatiquement,
visulalisation des contre-exemples
de v
érification
1. La v
érification formelle en Esterel
2. Interfacer le code g
énéré et le simuler
3. Exec : contrôle d’activités asynchrones
21/02/2018
33
G. Berry, Collège de France
Agenda
•
Id
ée : appeler des fonctions (ou tâches) exécutées de
façon asynchrone
•
Attendre leur retour pour terminer au sens d’Esterel, lors
d’un instant
suivant
•
Les suspendre ou les tuer si l’instruction exec est
suspendue ou tuée par Esterel suspend, abort, exit, etc.
21/02/2018
34
G. Berry, Collège de France
L
’instruction Exec
Usage :
calculs longs, appels r
éseaux,
mouvements de bras de robots, etc.
21/02/2018
35
G. Berry, Collège de France
Exemple
input
A
,
B
,
X
;
return
R
;
var
V
,
W
: integer in
loop
suspend
weak abort
exec Task (
V
,
W
)(?
X
+1)
when
B
when
A
end loop
end var
valeurs et retours
par r
éférence
valeurs
r
éincarnation
⟹
passer un unique id à chaque appel
21/02/2018
36
G. Berry, Collège de France
Interface bas niveau d
’Exec (Esterel v5)
typedef struct {unsigned int
start
: 1
;
unsigned int
kill
: 1 ;
unsigned int
active
: 1 ;
unsigned int
suspended
: 1 ;
unsigned int
prev_active
: 1 ;
unsigned int
prev_suspended
: 1 ;
/* to generate suspend / resume */
unsigned int
exec_index
;
/* unique id in the program */
unsigned int
task_exec_index
;
/* unique run-time id*/
void (*pStart)() ;
/* takes a function as argument */
int (*pRet)() ;
/* may take a value as argument */
}
__ExecStatus
;
21/02/2018
37
G. Berry, Collège de France
Interface haut niveau d
’Exec (Esterel v5)
#include "exec_status.h"
my_start
() { ... }my_kill
() { ... }my_suspend
() { ... }my_resume
() { ... }STD_EXEC
(
R1
,
REACT
,
my_start_1
,
my_kill_1
,
my_suspend_1
,
my_resume_1
);
STD_EXEC
(
R2
,
REACT
,
my_start_2
,
my_kill_2
,
my_suspend_2
,
my_resume_2
);
/*engendrer automatiquement un STD_EXEC pour chaque t
âche */
STD_EXEC_FOR_TASK
(
TASK
,
REACT
,
my_start
,
my_kill
,
my_suspend
,
my_resume
);
Pr
écis, mais assez lourd à l’usage
Très simplifé en HipHop.js (programmation fonctionnelle)
21/02/2018
38
G. Berry, Collège de France
function
execColor
(
langPair
) {return
MODULE
(
IN
text
,
OUT
color
,
OUT
trans
,
OUT
error
) {EMIT
color
("red");AWAIT
IMMEDIATE
(
NOW
(
text
));
PROMISE
trans
,
error
translate
(langPair,
VAL
(
text
));
EMIT
color("green");}
}
window.onload = function() { hh = require("hiphop");m = new hh.
ReactiveMachine
(
MODULE
(
IN
text
,
OUT
transEn
,
OUT
colorEn
,
OUT
transNe
,
OUT
colorNe
,
OUT
transEs
,
OUT
colorEs
,
OUT
transSe
,
OUT
colorSe
) {LOOPEACH
(
NOW
(
text
)) {FORK
{RUN
(
execColor
("fr|en"), color
=
colorEn
,
trans
=
transEn
);
} PAR {RUN
(
execColor
("en|fr"), color
=
colorNe
,
text
=
transEn
,
trans
=
transNe
);
} PAR {RUN
(
execColor
("fr|es"), color
=
colorEs
,
trans
=
transEs
);
} PAR {RUN
(
execColor
("es|fr"), color
=
colorSe
,
text
=
transEs
,
trans
=
transSe
);
}
}
}, {debuggerName: "debug"});}
}
•
Version JavaScript de HiHop, dont la version Scheme a
été présentée avec M. Serrano le
21/02/2018
39
G. Berry, Collège de France
HipHop.js
21/02/2018
40
G. Berry, Collège de France
exec-statement:
EXEC
exec-start
exec-paramsopt
EXECEMIT
identifier
exec-start exec-params
opt
PROMISE
identifier
,
identifier
exec-start exec-params
opt
exec-start:
js-bridge
DONE
DONEREACT
exec-params:
ONSUSP
js-bridge
ONRES
js-bridge
ONKILL
js-bridge
js-bridge:
instruction
JS
THIS
This content delves into the applications of formal verification and automata abstraction in Esterel, focusing on techniques such as verification by abstraction of automata, boolean verification using BDDs, bounded model checking in SAT/SMT, and more. The work of Gérard Berry at the Collège de France is highlighted, emphasizing practical examples in robotics and software verification. The use of tools like TiGeR, UPPAAL, and CADP is discussed, showcasing how these techniques are applied in real-world scenarios to verify complex systems.

Download Presentation

Please find below an Image/Link to download the presentation.
The content on the website is provided AS IS for your information and personal use only. It may not be sold, licensed, or shared on other websites without obtaining consent from the author.If you encounter any issues during the download, it is possible that the publisher has removed the file from their server.
You are allowed to download the files provided on this website for personal or commercial use, subject to the condition that they are used lawfully. All files are the property of their respective owners.
The content on the website is provided AS IS for your information and personal use only. It may not be sold, licensed, or shared on other websites without obtaining consent from the author.
E N D
Presentation Transcript
Esterel de A Z 6. Exec, v rification formelle, HipHop.js G rard Berry Coll ge de France Chaire Algorithmes, machines et langages Cours du 28 mars 2018 Pr c d du s minaire de Lionel Rieg gerard.berry@college-de-france.fr http://www-sop.inria.fr/members/Gerard.Berry
Vrification par abstraction dautomates Travaille sur les automates explicites (option A) Abstraction des donn es et de signaux, r duction par bisimulation observationnelle (cf cours du ) Syst mes : Auto (R. de Simone, D. Vergamini) : calcul efficace des r ductions Autograph (V. Roy) : dessin interactif des automates r duits (Auto et Autograph ont eu bien d autres applications) Tr s utile, mais limit par le risque d explosion des automates Plus r cents : UPPAAL (c. 30/03/2016), CADP (c. 06/04/2016) G. Berry, Coll ge de France 21/02/2018 2
Exemple : robotique en ORRCAD G. Berry, Coll ge de France 21/02/2018 3
Exemple : robotique en ORRCAD The International Journal of Robotics Research, April 1st, 1998 G. Berry, Coll ge de France 21/02/2018 4
Vrification boolenne par BDDs Tr s utile, m me si elle ne traite pas les donn es Utilis e en grand par Dassault Aviation et d autres en logiciel, puis pour les circuits de contr le (Intel, T.I., etc.) Fond e surtout sur le package de BDD TiGeR (O. Coudert, J-C. Madre et H. Touati) et d velopp e par A. Bouali Principe : calcul des tats atteignables, apr s abstraction ventuelles selon les propri t s prouver Calcul de contre-exemples par exploration inverse de l espace d tats Utilit majeure aussi dans la g n ration de tests, par contre-exemples des propri t s videmment fausses Ascenseur : Il est impossible de visiter tous les tages et d y ouvrir la porte G. Berry, Coll ge de France 21/02/2018 5
2. Calcul des tats accessibles (RSS) (voir cours du 21 mars 2018) V I O C CR R contre-exemple R0 = 0 R1 = R0 CR(R0,V) ... Ri+1 = Ri CR(Ri,V) Rn+1 = Rn CR(Rn,V)= Rn RSS=Rn A chaque tape, utiliser Riet V comme simplifieurs pour CR G. Berry, Coll ge de France 21/02/2018 6
Bounded Model Checking en SAT / SMT Principe du Bounded Model Checking (BMC) construire une formule SAT (contr le) ou SMT (contr le + donn es) par d pliement progressif de l espace d tats tats accessibles en 1, 2, 3, transitions d tecte toutes les erreurs, mais on ne sait pas quand des m thodes r centes incorporent la recherche automatique de propri t s inductives pour la preuve totale Pour Esterel v7 : v rifieur SAT / SMT Prover SL de Prover Technologies (G. St lmark) G. Berry, Coll ge de France 21/02/2018 7
Lascenseur en Esterel v7 data SizeData : constant N : integer = 4; end data interface TimerIntf : output StartTimer ; input TimerExpired ; end interface interface ElevatorEngineIntf : output Start ; output Up; output Down ; output Stop ; input CabinStopped ; end interface // This interface comprises the sensors that tell the cabin is reaching a floor. interface FloorSensorIntf : data SizeData ; input ReachingFloor [N]; end interface G. Berry, Coll ge de France 21/02/2018 8
interface CabinIntf : // user door control buttons input DoorOpen ; input DoorClose ; // the sensor unit that signals traversal of door ( light cell ) and shocks input DoorSensor ; // the sensors that signals proper door opening and closing input DoorIsOpen ; input DoorIsClosed ; // basic input relations input relation DoorIsClosed # DoorSensor ; input relation DoorIsClosed # DoorOpen ; // Alfred de Musset // commands to drive door opening and closing motors output OpenDoorMotorOn ; output OpenDoorMotorOff ; output CloseDoorMotorOn ; output CloseDoorMotorOff ; end interface G. Berry, Coll ge de France 21/02/2018 9
interface ButtonsAndLightsIntf : data SizeData ; input CabinCall [N]; // numbered buttons in the cabin input UpCall [N]; // up buttons at floors (fake one at floor N -1) input DownCall [N]; // down buttons at floors (fake one at floor 0) output CurrentUp ; // up arrows at floors and in cabin output CurrentDown ; // down arrows at floors and in cabin output CurrentFloor [N]; // to light up current floor number (one-hot array ) output StoppedAtFloor [N]; // triggers a bell at floor output PendingCabinCall [N]; // sent to the cabin floor button lights output PendingUpCall [N]; // sent to floor up button lights output PendingDownCall [N]; // sent to floor down button lights output PendingCall [N]; // some pending call at floor N end interface G. Berry, Coll ge de France 21/02/2018 10
module Cabin : extends TimerIntf ; extends CabinIntf ; input CabinStopped ; // the signal that tells the elevator is stopped loop trap Done in loop emit OpenDoorMotorOn ; await DoorIsOpen ; emit OpenDoorMotorOff ; abort finalize emit StartTimer ; await TimerExpired or DoorClose ; emit CloseDoorMotorOn ; await DoorIsClosed ; exit Done with emit CloseDoorMotorOff ; end finalize when DoorOpen or DoorSensor end loop end trap; await CabinStopped end loop end module G. Berry, Coll ge de France 21/02/2018 11
module CallHandler : data SizeData ; extends ButtonsAndLightsIntf ; extends ElevatorEngineIntf ; extends FloorSensorIntf ; input DoorIsClosed ; // from cabin signal CallToGoUp , CallToGoDown in <compute current floor and decide whether to stop > || <compute StoppedAtFloor [i] for each floor i> || <compute pending calls > || <compute calls to go up or down > || <compute CurrentUp or CurrentDown directions > || <start motor in appropriate direction > || <internal consistency assertions > end signal end module G. Berry, Coll ge de France 21/02/2018 12
<compute current floor and decide whether to stop> emit CurrentFloor [1]; always signal ReachingSomeFloor in for i < N dopar if ReachingFloor [i] then emit ReachingSomeFloor ; // set current floor i; automatically resets previous current floor emit CurrentFloor [i]; // we have to stop if we are moving in a direction and // either there is a floor call for the same direction at this floor // or there is no more call at further floors in the same direction // warning : we have to take pre( CurrentUp ) because CurrentUp // is reset in the instant if there is no call up if ((pre(CurrentUp ) and (PendingUpCall [i] or not CallToGoUp)) or (pre(CurrentDown ) and ( PendingDownCall [i] or not CallToGoDown))) then emit Stop end else // not reaching floor i , we simply need to cancel potential current // floor emission if some other floor has just been reached . emit CurrentFloor [i] <= pre( CurrentFloor [i]) and not ReachingSomeFloor end if end for end signal end always G. Berry, Coll ge de France 21/02/2018 13
<compute StoppedAtFloor [i] for each floor i> weak abort sustain StoppedAtFloor [1] when Start ; for i < N dopar loop await ReachingFloor [i] and Stop ; await CabinStopped ; weak abort sustain StoppedAtFloor [i] when Start end loop end for G. Berry, Coll ge de France 21/02/2018 14
<compute pending calls > for i < N dopar always if (not StoppedAtFloor [i]) then emit { PendingCabinCall [i] <= CabinCall [i] or pre(PendingCabinCall [i]), PendingUpCall [i] <= UpCall [i] or pre(PendingUpCall [i]), PendingDownCall [i] <= DownCall [i] or pre( PendingDownCall [i]), PendingCall [i] = PendingCabinCall [i] or PendingUpCall [i] or PendingDownCall [i], } end if end always end for G. Berry, Coll ge de France 21/02/2018 15
<compute calls to go up or down > signal AuxUpFloor [N], AuxCallToGoUp [N] in sustain { seq { for i < N -1 doup AuxUpFloor [i+1] <= CurrentFloor [i] or AuxUpFloor [i], AuxCallToGoUp [i+1] <= (PendingCall [i+1] and AuxUpFloor [i+1]) or AuxCallToGoUp [i] end for }, CallToGoUp <= AuxCallToGoUp [N -1] } end signal || // computing whether there is a call for going down // Warning : this code uses a combinational down carry chain signal AuxDownFloor [N], AuxCallToGoDown [N] in sustain { seq { for i < N -1 dodown AuxDownFloor [i] <= CurrentFloor [i+1] or AuxDownFloor [i+1] , AuxCallToGoDown [i] <= (PendingCall [i] and AuxDownFloor [i]) or AuxCallToGoDown [i+1] end for }, CallToGoDown <= AuxCallToGoDown [0] } end signal G. Berry, Coll ge de France 21/02/2018 16
<compute CurrentUp or CurrentDown directions > loop await case immediate CallToGoUp do abort sustain CurrentUp when not CallToGoUp case immediate CallToGoDown do abort sustain CurrentDown when not CallToGoUp end await end loop G. Berry, Coll ge de France 21/02/2018 17
<start motor in appropriate direction > loop await StartOK ; await immediate CallToGoUp or CallToGoDown ; emit Start ; if case pre(CurrentUp) and CallToGoUp do emit Up case pre(CurrentDown ) and CallToGoDown do emit Down case CallToGoUp do emit Up case CallToGoDown do emit Down end if end loop G. Berry, Coll ge de France 21/02/2018 18
Assertions de cohrence interne sustain { // there is always a direction given at start time assert SomeDirection = Start => (Up or Down), // always start up at bottom floor assert NoBottomCrash = (StoppedAtFloor [0] and Start ) => Up , // always start down at top floor assert NoTopCrash = (StoppedAtFloor [N -1] and Start ) => Down , // tell stopped at only one floor at a time (as is, not parametric in N) assert StopOK = StoppedAtFloor [0] # StoppedAtFloor [1] # StoppedAtFloor [2] # StoppedAtFloor [3] } G. Berry, Coll ge de France 21/02/2018 19
Vrification par observateurs (N. Halbwachs) OK Prog Obs BUG E Env Pour toutes les s quences d entr e OK, l observateur n met jamais BUG G. Berry, Coll ge de France 21/02/2018 20
Assertion temporelle : l ascenseur ne voyage pas la porte ouverte signal Running in loop await Start ; abort sustain Running when CabinStopped end loop || loop await OpenDoorMotorOn ; abort sustain assert DoorOpenedWhenMovingBug if Running when DoorIsClosed end loop end signal G. Berry, Coll ge de France 21/02/2018 21
Dfinition de lenvironnement Mais l ascenseur n volue pas dans un environnement physique quelconque ! caract risation de l environnement, indispensable pour v rifier les propri t s et produire des contre-exemples pertinents en r duisant les entr es et l espace d tats La caract risation de l environnement est souvent longue et d licate ! mais elle nous en apprend beaucoup G. Berry, Coll ge de France 21/02/2018 22
Contraintes denvironnement de lascenseur trap Bad in always // no up call button at top floor if UpCall [N-1] then exit Bad end || // no down call button at bottom floor if DownCall [0] then exit Bad end || // elevator is at most at one floor at a time if not ( ReachingFloor [0] # ReachingFloor [1] # ReachingFloor [2] # ReachingFloor [3] ) then exit Bad end if || // A door must be open or closed ( Musset ) if not ( DoorIsOpen # DoorIsClosed ) then exit Bad end if end always peut mieux faire ! G. Berry, Coll ge de France 21/02/2018 23
Contraintes denvironnement de lascenseur || // at most one TimerExpired after StartTimer abort every immediate TimerExpired do exit Bad end when StartTimer ; loop if TimerExpired then exit Bad end; await TimerExpired ; every TimerExpired do exit end each StartTimer || // at most one CabinStopped with one tick to react loop weak abort every immediate CabinStopped do exit Bad end when Stop ; await CabinStopped ; pause end loop G. Berry, Coll ge de France 21/02/2018 24
Contraintes denvironnement de lascenseur || signal ReachingSomeFloor , ShiftedCurrentFloor [N+3] , MovingUp , MovingDown in sustain { for i < N dopar ReachingSomeFloor <= ReachingFloor [i] end for } || // cannot reach a floor between Stop and Start loop weak abort every ReachingSomeFloor do exit Bad end when Start ; await Stop end loop G. Berry, Coll ge de France 21/02/2018 25
Contraintes denvironnement de lascenseur || signal ReachingSomeFloor , ShiftedCurrentFloor [N+3] , MovingUp , MovingDown in || // when at floor i , the next floor is necessarily i+1 or i-1 loop abort sustain { for i < N do ShiftedCurrentFloor [i+1] <= pre( ShiftedCurrentFloor [i+1]) end for } when immediate ReachingSomeFloor ; emit { for i < N do ShiftedCurrentFloor [i +1] <= ReachingFloor [i] end for }; pause end loop G. Berry, Coll ge de France 21/02/2018 26
Contraintes denvironnement de lascenseur || signal ReachingSomeFloor , ShiftedCurrentFloor [N+3] , MovingUp , MovingDown in || loop await Start ; weak abort if case Up do sustain MovingUp case Down do sustain MovingDown default do emit Ignore end if when Stop end loop G. Berry, Coll ge de France 21/02/2018 27
Contraintes denvironnement de lascenseur || signal || emit ShiftedCurrentFloor [2] ; weak abort every immediate ReachingSomeFloor do exit Bad end when Start ; loop await ReachingSomeFloor ; for i<N dopar if ReachingFloor [i] then if MovingUp and not pre(ShiftedCurrentFloor [i]) then exit Bad end if ; if MovingDown and not pre(ShiftedCurrentFloor [i+2]) then exit Bad end if ; end if end for end loop end signal handle Bad do emit Ignore end trap end module G. Berry, Coll ge de France 21/02/2018 28
Agenda 1. La v rification formelle en Esterel 2. Interfacer le code g n r et le simuler G. Berry, Coll ge de France 21/02/2018 29
Comment excuter un programme Esterel En circuits : engendrer du Verilog, utiliser une CAO standard En logiciel : plusieurs mani res quivalentes d engendrer un code C (ou C++, etc.), et plusieurs fa ons de l int grer dans du code plus g n ral principe : d finir des fonctions associ es aux sorties, donner les entr es, appeler la fonction de r action pas de contrainte sp cifique sur quand et comment mais une contrainte absolue : l ex cution du code de la fonction de r action doit tre atomique. en particulier, les valeurs des entr es doivent rester constantes pendant toute la r action G. Berry, Coll ge de France 21/02/2018 30
Exemple pour ABRO void ABRO_O_O () { printf( O emitted\n ); } void main () { ABRO_reset(); // ABRO initialization ABRO(); // empty tick ABRO_I_A(); // input A ABRO_I_B();// input B, same instant ABRO(); // tick, emits O ABRO_I_R(); // input R, reset } BLEU : d finir par l utilisateur MARRON : d fini par le compilateur Esterel G. Berry, Coll ge de France 21/02/2018 31
Simuler un programme Esterel Seule chose d finir : les types et fonctions de donn es Trois types de simulation : textuelle : entr e des signaux au terminal ou par fichier textuelle : tra age optionnel des signaux, variables, etc. graphique : xes, Esterel Studio textuelle : entr es par clics, sorties visuelles animation color e du code source mixte : magn tophone dans les simulateurs graphiques mixte : lisant et crivant les formats textuels Usage : debugging, non-r gression, ex cution des tests engendr s automatiquement, visulalisation des contre-exemples de v rification G. Berry, Coll ge de France 21/02/2018 32
Agenda 1. La v rification formelle en Esterel 2. Interfacer le code g n r et le simuler 3. Exec : contr le d activit s asynchrones G. Berry, Coll ge de France 21/02/2018 33
Linstruction Exec Id e : appeler des fonctions (ou t ches) ex cut es de fa on asynchrone Attendre leur retour pour terminer au sens d Esterel, lors d un instant suivant Les suspendre ou les tuer si l instruction exec est suspendue ou tu e par Esterel suspend, abort, exit, etc. Usage : calculs longs, appels r seaux, mouvements de bras de robots, etc. G. Berry, Coll ge de France 21/02/2018 34
Exemple input A, B, X; return R; var V, W : integer in loop suspend weak abort exec Task (V, W)(?X+1) when B when A end loop end var valeurs et retours par r f rence valeurs r incarnation passer un unique id chaque appel G. Berry, Coll ge de France 21/02/2018 35
Interface bas niveau dExec (Esterel v5) typedef struct { unsigned int start : 1; unsigned int kill : 1 ; unsigned int active : 1 ; unsigned int suspended : 1 ; unsigned int prev_active : 1 ; unsigned int prev_suspended : 1 ; /* to generate suspend / resume */ unsigned int exec_index ; /* unique id in the program */ unsigned int task_exec_index ; /* unique run-time id*/ void (*pStart)() ; /* takes a function as argument */ int (*pRet)() ; /* may take a value as argument */ } __ExecStatus ; G. Berry, Coll ge de France 21/02/2018 36
Interface haut niveau dExec (Esterel v5) #include "exec_status.h" my_start () { ... } my_kill () { ... } my_suspend () { ... } my_resume () { ... } STD_EXEC (R1, REACT, my_start_1, my_kill_1, my_suspend_1, my_resume_1); STD_EXEC (R2, REACT, my_start_2, my_kill_2, my_suspend_2, my_resume_2); /*engendrer automatiquement un STD_EXEC pour chaque t che */ STD_EXEC_FOR_TASK (TASK, REACT, my_start, my_kill, my_suspend, my_resume); Pr cis, mais assez lourd l usage Tr s simplif en HipHop.js (programmation fonctionnelle) G. Berry, Coll ge de France 21/02/2018 37
function execColor(langPair) { return MODULE (IN text, OUT color, OUT trans, OUT error) { EMIT color("red"); AWAIT IMMEDIATE(NOW(text)); PROMISE trans, error translate(langPair, VAL(text)); EMIT color("green"); } } window.onload = function() { hh = require("hiphop"); m = new hh.ReactiveMachine(MODULE (IN text, OUT transEn, OUT colorEn, OUT transNe, OUT colorNe, OUT transEs, OUT colorEs, OUT transSe, OUT colorSe) { LOOPEACH(NOW(text)) { FORK { RUN(execColor("fr|en"), color=colorEn, trans=transEn); } PAR { RUN(execColor("en|fr"), color=colorNe, text=transEn, trans=transNe); } PAR { RUN(execColor("fr|es"), color=colorEs, trans=transEs); } PAR { RUN(execColor("es|fr"), color=colorSe, text=transEs, trans=transSe); } } }, {debuggerName: "debug"}); } } G. Berry, Coll ge de France 21/02/2018 38





")













")















")
")
 {")