Forced Vibration in Spring-Mass Systems


Forced Vibration

F(t)
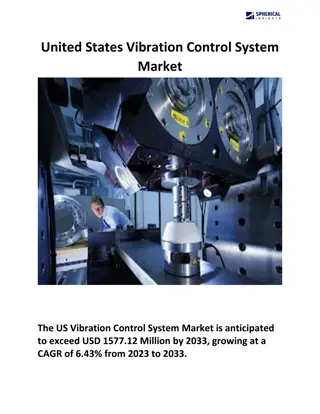
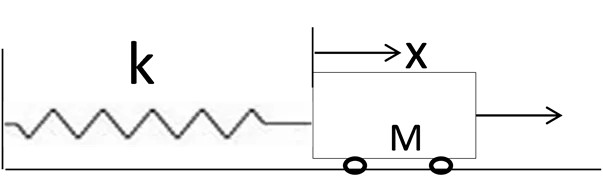
Aim: Derive the differential equation of motion of spring
mass system subjected to external applied excitation force.

Forced Vibration
1.
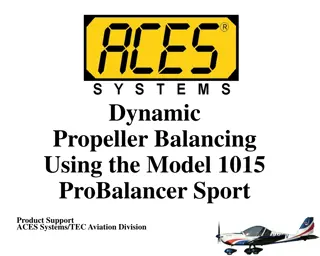
First we define coordinate to specify
position of mass M. We choose a
coordinate fixed at natural length
of spring. Suppose position of mass M
is x at any instant of time t.
2.
Draw free body diagram of mass M.
F
s
is spring force.
F(t) is external applied time
varying force.
N is normal contact force.
F
s
F(t)
Mg
N
Forced Vibration
F(t)
3. Apply Newton second law of motion:
Σ
F
x
= m a
x
m ẍ = F (t) – F
s
m ẍ + F
s
= F(t)
m ẍ + k x = F(t)
This equation is known as differential
equation of motion (DEOM).
Forced Vibration
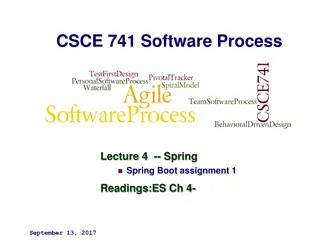
m ẍ + k x = F(t) - - - - - (1)
a)
Case – 1 :
F(t) is harmonic force
F(t) = F
0
Sin (
ω
t)
F
0
= Force Amplitude.
ω
= exciting frequency
Equation (1) is second order
Non homogenous differential
Equation.
Solution of equation (1) is
x(t) = complementary / transient
solution +steady state solution.
x(t) = x
c
(t) + x
ss
(t).
For complementary solution
:
m ẍ
c
+ k x
c
= 0
For steady state solution
:
m ẍ
ss
+ k x
ss
= F
0
Sin (
ω
t)
Forced Vibration
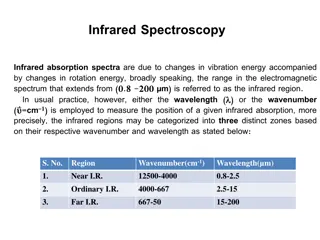
For steady state solution
:
m ẍ
ss
+ k x
ss
= F
0
Sin (
ω
t)
Steady state solution take a
form x
ss
(t) = X
0
Sin(
ω
t –
φ
)
X
0
= Displacement amplitude.
φ
= Phase angle.
Substitute in above equation we
Get,
- m X
0
ω
2
Sin (
ω
t –
φ
) + k X
0
Sin(
ω
t –
φ
) =
F
0
Sin (
ω
t)
( k – m
ω
2
) X
0
Sin(
ω
t –
φ
) = F
0
Sin (
ω
t)
Steady state solution
( k – m
ω
2
) X
0
Sin(
ω
t –
φ
) = F
0
Sin (
ω
t)
After equating above equation we get,
(k – m
ω
2
) X
0
= F
0
F
0
(k – m
ω
2
)
φ
= 0
0
Steady state solution
:
x
ss
(t) = X
0
Sin(
ω
t)
Note : Phase angle is equal to zero.
X
0
=
Resonance condition
Take excitation frequency is equal to natural frequency.
If
ω
=
ω
n
then displacement amplitude X
0
is equal to infinity. So
this condition is called as resonance.
Characteristic of resonance:
Spring mass system vibrate is larger amplitude then our structure
will fail.
This content explains forced vibration in spring-mass systems, deriving the differential equation of motion and discussing solutions for both the complementary and steady-state scenarios. It delves into concepts like resonance conditions and the behavior of structures under larger amplitude vibrations.

Download Presentation

Please find below an Image/Link to download the presentation.
The content on the website is provided AS IS for your information and personal use only. It may not be sold, licensed, or shared on other websites without obtaining consent from the author. Download presentation by click this link. If you encounter any issues during the download, it is possible that the publisher has removed the file from their server.
E N D
Presentation Transcript
Forced Vibration Aim: Derive the differential equation of motion of spring mass system subjected to external applied excitation force. x k F(t) M
Forced Vibration 1. First we define coordinate to specify position of mass M. We choose a coordinate fixed at natural length of spring. Suppose position of mass M is x at any instant of time t. x k F(t) M 3. Apply Newton second law of motion: 2. Draw free body diagram of mass M. Fx = m ax m = F (t) Fs Mg m + Fs = F(t) F(t) Fs m + k x = F(t) N Fs is spring force. F(t) is external applied time varying force. This equation is known as differential equation of motion (DEOM). N is normal contact force.
Forced Vibration m + k x = F(t) - - - - - (1) Solution of equation (1) is a) Case 1 : F(t) is harmonic force x(t) = complementary / transient solution +steady state solution. x(t) = xc (t) + xss (t). F(t) = F0 Sin ( t) For complementary solution: m c + k xc = 0 F0 = Force Amplitude. = exciting frequency For steady state solution: Equation (1) is second order Non homogenous differential Equation. m ss + k xss = F0 Sin ( t)
Forced Vibration For steady state solution: m ss + k xss = F0 Sin ( t) Steady state solution take a form xss (t) = X0 Sin( t ) X0 = Displacement amplitude. = Phase angle. Substitute in above equation we Get, - m X0 2 Sin ( t ) + k X0 Sin( t ) = F0 Sin ( t) ( k m 2 ) X0 Sin( t ) = F0 Sin ( t)
Steady state solution ( k m 2 ) X0 Sin( t ) = F0 Sin ( t) After equating above equation we get, (k m 2 ) X0 = F0 F0 (k m 2 ) X0 = = 00 Steady state solution: xss (t) = X0 Sin( t) Note : Phase angle is equal to zero.
Resonance condition Take excitation frequency is equal to natural frequency. If = n then displacement amplitude X0 is equal to infinity. So this condition is called as resonance. Characteristic of resonance: Spring mass system vibrate is larger amplitude then our structure will fail.