Acquisition, Tracking, and Pointing (ATP) for NG-OWC System in Drone Networks
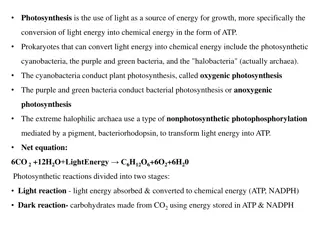
The research discusses the implementation of Acquisition, Tracking, and Pointing (ATP) in Next-Generation Optical Wireless Communication (NG-OWC) systems for drone networks. It covers the background of drone networks, ATP overview, schemes, tracking mechanism, current developments, challenges, and conclusions related to ATP in drones.

Download Presentation

Please find below an Image/Link to download the presentation.
The content on the website is provided AS IS for your information and personal use only. It may not be sold, licensed, or shared on other websites without obtaining consent from the author. Download presentation by click this link. If you encounter any issues during the download, it is possible that the publisher has removed the file from their server.
E N D
Presentation Transcript
DCN 15-24-0394-00-07ma July 2024 IG NG-OWC Submission Title: Acquisition, Tracking, and Pointing (ATP) for NG-OWC system in Drone Networks Date Submitted: July 16, 2024 Source: Miftahul Khoir Shilahul Umam, Ida Bagus Krishna Yoga Utama, Nguyen Ngoc Huy, Yeong Min Jang (Kookmin University) Address: Kookmin University, 77 Jeongneung-Ro, Seongbuk-Gu, Seoul, 02707, Republic of Korea Voice: +82-2-910-5068 E-Mail: yjang@kookmin.ac.kr Re: Abstract: Present the research direction of ATP implementation in NG-OWC systems. Purpose: Presentation for contribution on IG NG-OWC Notice: This document has been prepared to assist the IG NG-OWC. It is offered as a basis for discussion and is not binding on the contributing individual(s) or organization(s). The material in this document is subject to change in form and content after further study. The contributor(s) reserve(s) the right to add, amend or withdraw material contained herein. Release: The contributor acknowledges and accepts that this contribution becomes the property of IEEE and may be made publicly available by IG NG-OWC. Slide 1 Yeong Min Jang Submission
DCN 15-24-0394-00-07ma July 2024 Acquisition, Tracking, and Pointing (ATP) for NG-OWC system in Drone Networks Contribution July 16, 2024 Slide 2 Yeong Min Jang Submission
DCN 15-24-0394-00-07ma July 2024 Contents Background ATP Overview ATP Schemes ATP Tracking Mechanism Current Development of ATP for Drones Challenges Conclusion Slide 3 Yeong Min Jang Submission
DCN 15-24-0394-00-07ma July 2024 Background A drone network refers to a system where multiple drones (Unmanned Aerial Vehicles or UAVs) communicate and collaborate with each other to perform specific tasks. These tasks can range from surveillance, monitoring, data collection, delivery services, and more. Drone networks can also provide on-demand communications for remote and hard-to-reach areas. OWC (such as FSO and OCC) in drone networks provide more secure communication, immunity to RF interference, low latency, license-free, and higher bandwidth. Slide 4 Yeong Min Jang Submission
DCN 15-24-0394-00-07ma July 2024 ATP Overview The Acquisition, Tracking, and Pointing (ATP) system is a crucial component in ensuring reliable communication between moving drones. ATP can be divided into three parts: Acquisition Acquisition refers to the process of initially locating the target drone or ground station to establish a communication link. This involves: 1. Initial Search: The system performs a wide-angle scan to locate the target. This can be achieved using a variety of sensors, such as cameras or LIDAR, to detect the position of the target drone. 2. Coarse Alignment: Once the target is detected, the system coarsely aligns the optical beam in the general direction of the target. This may involve using gimbal systems or other mechanical actuators to position the transmitter and receiver. Slide 5 Yeong Min Jang Submission
DCN 15-24-0394-00-07ma July 2024 ATP Overview (cont.) Tracking Tracking is the process of maintaining the alignment between the communicating drones despite their relative movements. This involves: 1. Fine Alignment: After coarse alignment, the system performs fine adjustments to precisely align the optical beam with the target. This is usually achieved with high-precision actuators or fast steering mirrors. 2. Real-time Adjustment: As drones are constantly moving, the tracking system must continuously adjust the beam direction in real-time to compensate for the motion. This requires feedback mechanisms, often involving sensors that detect the position of the incoming signal and adjust the beam direction accordingly. Pointing Pointing is about directing the optical beam accurately at the target to ensure a stable communication link. This involves: 1. Beam Control: The system must control the direction and divergence of the optical beam. The beam must be narrow enough to maintain high data rates but wide enough to accommodate minor misalignments due to tracking errors. 2. Stabilization: To ensure the beam remains pointed at the target despite drone vibrations and environmental disturbances, the system may use stabilization techniques such as gyroscopes or inertial measurement units (IMUs). Slide 6 Yeong Min Jang Submission
DCN 15-24-0394-00-07ma July 2024 ATP Schemes <ATP mechanism [1]> According to Kaymak et. al. [1], ATP schemes can be categorized as follows: Gimbal-based: Gimbal-based ATP mechanisms use a mechanical rotary gimbal controlled by motors. The motorized platforms provide two or three-axis moving capability to the gimbal. Mirror-based: Mirror-based ATP mechanisms use fast steering mirrors (FSMs) to perform beam stabilization, pointing, and tracking. FSMs deflect the incident beam onto the receiving sensor. Unlike gimbal-based ATP, FSMs are lightweight because the mirror they move has a small mass. Gimbal-Mirror Hybrid ATP: Hybrid ATP mechanisms employ a gimbal and an FSM in tandem to perform both coarse and fine tracking. Slide 7 Yeong Min Jang Submission
DCN 15-24-0394-00-07ma July 2024 ATP Schemes (cont.) <ATP mechanism [1]> Adaptive Optics: Inherited from astronomical telescopes. AO corrects wave- front distortions of optical waves through atmospheric turbulence by using deformable mirrors and wave-front sensors Liquid-Crystal based: ThisATP mechanism uses non-mechanical, fine beam- steering devices that consist of a one-dimensional array of tens of thousands of long thin electrodes to manipulate the amplitude or phase pattern of a light beam. RF-FSO hybrid: RF-based signaling can be used as an auxiliary link where the positioning messages are transmitted when the FSO link is down. Slide 8 Yeong Min Jang Submission
DCN 15-24-0394-00-07ma July 2024 ATP Schemes (cont.) <ATP mechanism [1]> Other schemes: Rotating head: A rotating head mechanism is proposed for FSO communications between two autonomous mobile nodes. A movable head carries an FSO transceiver, capable of mechanically rotating 360 , to maintain LOS between mobile nodes. Spherical node design: A spherical FSO node design where the whole surface of the FSO node is covered by transmitter and receiver modules. Slide 9 Yeong Min Jang Submission
DCN 15-24-0394-00-07ma July 2024 ATP Schemes (cont.) <The control system of the hybrid ATP system in FSO communication> Slide10 Yeong Min Jang Submission
DCN 15-24-0394-00-07ma July 2024 ATP Tracking Mechanism According to Abdelfatah et. al [2], tracking mechanism approaches in ATP can be categorized as follows: Conventional approach: Comprises of two modules of tracking (coarse and fine) which requires mechanical gimbal at both the ground station and the UAV to enable active tracking and alignment of the FSO link, which adds a high load to the UAV. Visual tracking approach: Utilizes modulating retro-reflector (MRR) to replace the use of a gimbal on the UAV, while a conventional gimbal is still used on the ground station only. Beam-tracking approach: Similar to the visual tracking approach but focuses on tracking the laser beam from the ground station using photodetectors. Slide 11 Yeong Min Jang Submission
DCN 15-24-0394-00-07ma July 2024 Current Development of ATP for Drones 100 Gbps optical data link [3] - This paper presents results from a coherent 1550 nm link across a turbulent atmosphere between a deployable optical terminal and a drone-mounted retroreflector. - Drone is used to simulate LEO satellite motion. - The proposed system utilizes optical closed-loop control based on FSMs to track the FSO transceiver. Slide12 Yeong Min Jang Submission
DCN 15-24-0394-00-07ma July 2024 Current Development of ATP for Drones AI utilization in ATP [4] - This paper proposed a GAN-based data augmentation introducing wavelet transform into the fusing-and-filling generative adversarial network (F2GAN). - The goal is to improve the tracking accuracy of the ATP system by accurately spotting the position of the spot centroid to receive optical signals appropriately. - GAN is proposed to overcome the lack of a dataset of FSO spot generation. Slide13 Yeong Min Jang Submission
DCN 15-24-0394-00-07ma July 2024 Challenges Mobility: Drones are highly mobile, and maintaining a stable optical link can be difficult due to rapid and unpredictable movements. Size: The rapid development of UAVs and their size reduction requires new PAT designs with the minimum size and complexity possible. The PAT system mounted on the UAV must have a proper weight that suits the UAV s weight limitations Predictive Tracking: the advantage of the predictive PAT mechanism is eliminating the time needed to get the vehicle s location using its GPS. Having prior knowledge about the UAV s trajectory may decrease the handover time of a ground-to-UAV or UAV-to-ground. Artificial intelligence: the visual tracking of UAVs is a promising alternative to the traditional coarse tracking mechanisms in terms of accuracy and speed. Slide14 Yeong Min Jang Submission
DCN 15-24-0394-00-07ma July 2024 Conclusion The ATP system is crucial to establishing FSO communication, especially in drone networks. There are several factors and challenges of the ATP system that need to be addressed, such as the scheme, the tracking approach, mobility, size, control system, etc. Slide15 Yeong Min Jang Submission
DCN 15-24-0394-00-07ma July 2024 References [1] Y. Kaymak, R. Rojas-Cessa, J. Feng, N. Ansari, M. Zhou and T. Zhang, "A Survey on Acquisition, Tracking, and Pointing Mechanisms for Mobile Free-Space Optical Communications," in IEEE Communications Surveys & Tutorials, vol. 20, no. 2, pp. 1104-1123, Second quarter 2018, doi: 10.1109/COMST.2018.2804323. [2] R. Abdelfatah, N. Alshaer, and T. Ismail, A review on pointing, acquisition, and tracking approaches in UAV-based FSO communication systems, Optical and Quantum Electronics, vol. 54, no. 9. Springer Science and Business Media LLC, Jul. 28, 2022. doi: 10.1007/s11082-022-03968-2. [3] S. M. Walsh et al., Demonstration of 100 Gbps coherent free-space optical communications at LEO tracking rates, Sci Rep, vol. 12, no. 1, p. 18345, Oct. 2022, doi: 10.1038/s41598-022-22027-0. [4] Y. Liu, Y. Liu, S. Song, K. Chen and L. Guo, "GAN-Based Data Augmentation for AI-Enabled ATP in Free Space Optical Communication," in IEEE Communications Letters, vol. 28, no. 5, pp. 1067-1071, May 2024, doi: 10.1109/LCOMM.2024.3362871. Slide16 Yeong Min Jang Submission